
资料下载


如何使用Arduino Uno制作智能避障机器人
萧持毅
分享资料个
描述
嗨,大家好。在这篇文章中,我将教你如何搭建一个避障机器人。该机器人将是一个小型且简单的两轮汽车,它将向前移动,直到它检测到路径上的障碍物。这样做后,它会停下来,向后移动一点,然后向左右看。
然后它将比较任一侧前方可用的距离,然后转向可用距离似乎更相对的方向。这样,它将能够在充满障碍的环境中移动而不会与任何障碍物发生碰撞。这是仓库机器人、无人驾驶汽车等各种应用中使用的防撞概念的一个小代表。
为了检测距离,机器人使用了 HC-SR04 超声波传感器。所以这个传感器每 10 微秒发送一次超声波,如果前方有任何障碍物,传感器就会接收到回波。根据行程时间,它知道传感器与物体之间的距离。那么让我们开始吧!
第 1 步:收集组件
首先,首先,我们显然需要收集构建机器人所需的组件和工具。在下面找到所需的组件和工具:
轻松在一处获取组件:Arduino 机器人套件
单个组件:
- Arduino UNO
- L293D 电机护罩
- 底盘(包括电机和车轮)
- 电线
- 电池座
- 微型伺服电机 SG90
- HC-SR04 超声波传感器
- 传感器安装座(可选)
工具(可选):
收集组件并继续下一步!
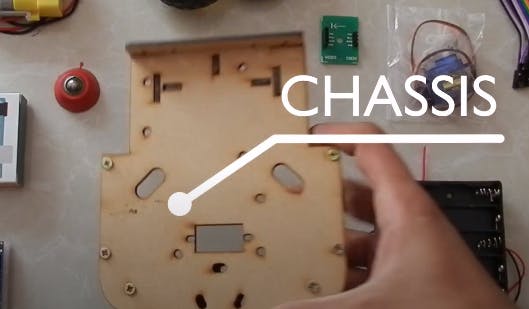
第 2 步:连接电机和车轮
我对底盘做的第一件事是在前部添加一个脚轮,作为前部的支撑第三轮,它可以自由旋转,因为它具有 360 度自由度。这样我们就可以避免使用 4 个轮子,而使用 2 轮机器人。
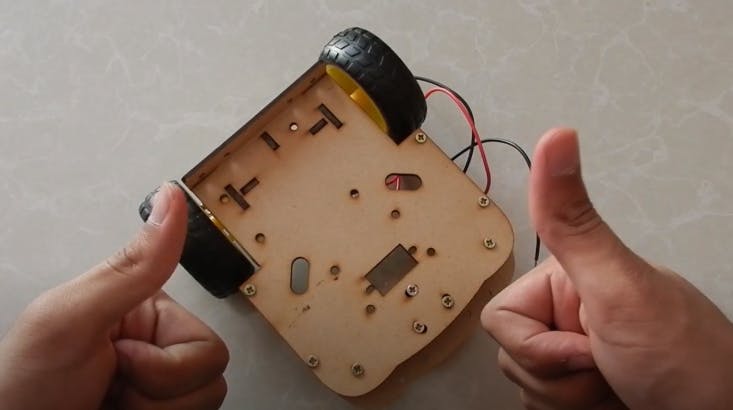
接下来我们需要做的是任何车辆相关项目中的经典步骤。将电机和车轮连接到底盘上。没有特别的方法可以做到这一点,因为每个人都可能使用不同的底盘,但我想在这里提一件事:确保电机牢固固定,水平相同,并且车轮准确指向前方。否则,您稍后可能会遇到一些与运动相关的问题。
将电线焊接到电机上,然后继续下一步!
第 3 步:连接 Arduino 和电机护罩
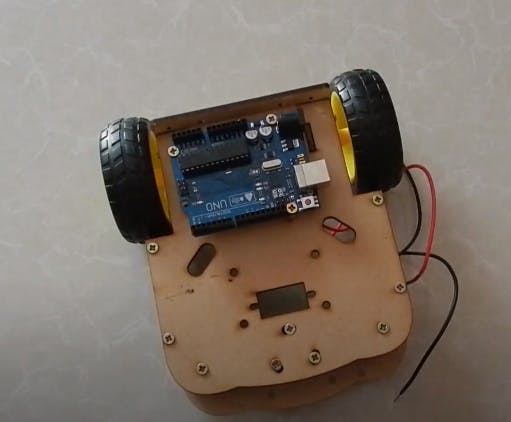
将 Arduino 板连接到机箱顶部。您可以以任何优选的方式附加它。这可以使用一些垫片和螺钉,也可以使用一块双面胶带直接将 Arduino 板粘在机箱上。就个人而言,我总是会使用第一种方法,因为它看起来更专业。
然后只需将电机护罩插入 Arduino 板的顶部,您就可以开始了!
第四步:添加伺服电机和超声波传感器
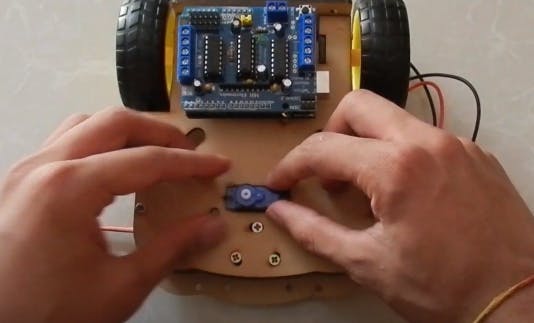
现在我们需要添加机器人的传感机制。这包括三个组件。
- 用于感应前方距离的超声波传感器。
- 用于左右旋转传感器的伺服电机。
- 将传感器固定在伺服电机上的传感器安装座。
我的底盘有一个用于连接伺服电机的切口,所以我只需将其插入切口中即可。如果你的也有一个,那就太好了。如果没有,那么只需使用一条双面胶带将其粘贴在机箱的正面。
然后使用传感器安装,将传感器连接到伺服电机并继续下一步!
第 5 步:接线
我们在这里再次提出三件事。因此,在为机器人接线时,我们需要注意三件事:
- 电机
电机护罩具有用于连接多达四个电机的端口,采用螺钉端子的形式。只需将电机连接到任意两个端子,因为我们只使用两个电机。
- 伺服电机
伺服电机只有一根插头线,里面有三根线。只需将其插入电机屏蔽上的伺服端子即S1 。
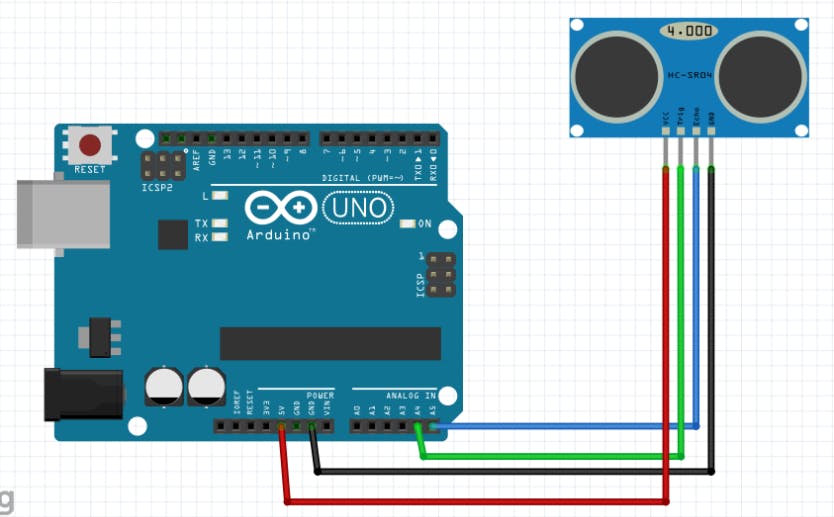
- 超声波传感器
- 传感器接地:Arduino 接地
- 传感器 VCC:Arduino +5V
- 传感器跳闸:Arduino A4
- 传感器回声:Arduino A5
此外,将电池座连接到电机护罩的电池螺丝端子并继续前进!
第 6 步:编码摊牌
现在,是时候在堆栈中的最后一张纸了。是时候对机器人进行编码并实际查看机器人是否可以正常工作了!
您可以尝试自己编写机器人代码以获得更好的体验和学习,但您可以随时参考下面的代码。我还上传了 Arduino 代码文件。确保在尝试运行代码之前安装了 Arduino IDE :)
谢谢你
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






