
资料下载


Arduino伺服电机避障机器人
分享资料个
描述
关于项目的一切
我是一名媒体艺术设计专业的学生,在马来西亚赛城多媒体大学学习。这是我学习媒体艺术的伽马年,交互设计是教学生如何使用 Arduino 组件及其工作原理的主题。所以在我的期末作业中,我选择了避障机器人作为我自己的项目,并了解每个组件的工作原理。
步骤1:
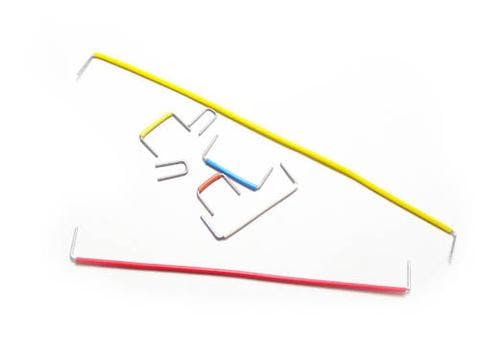
准备和构建您的机器人底盘。包装内有一些组件,底盘,两个电机,两个轮子,一个前轮,一个电池座,一些螺丝,开关和跳线。
第2步:
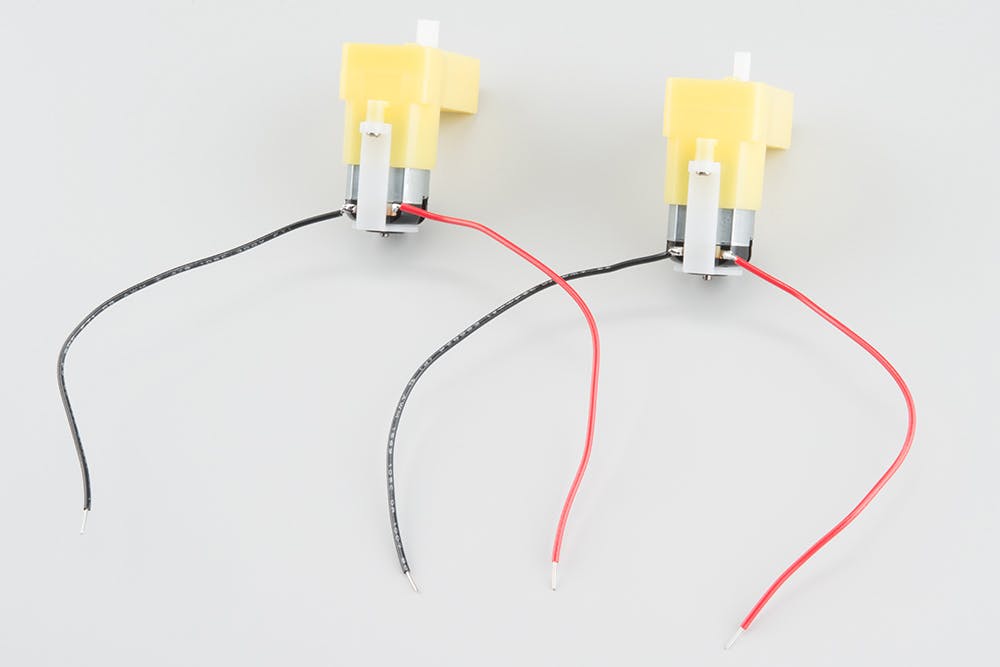
在焊接两个电机上的跳线之前,我建议测试每个组件以确保它们都工作正常,例如:直流电机、Arduino 板、电机屏蔽、伺服电机和超声波传感器。然后我们将开始在两个电机上焊接红线和黑线,示例如下图:
第 3 步:
来到我们的电池底盘和开关部分。我们只需要从电池底盘上剪下一半的黑线,并在 1 个孔处焊接一根线侧,另一根黑线将焊接在另一个孔处。我们的交换机准备好了!
第4步:
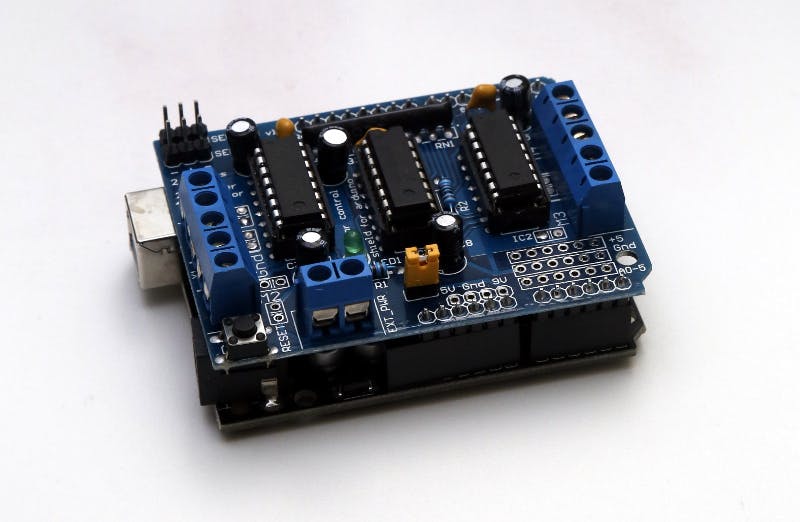
我们需要堆叠 Arduino 板和 Motor Shield 板,Motor Shield 将堆叠在 Arduino 板上。下面的例子:
第 5 步:
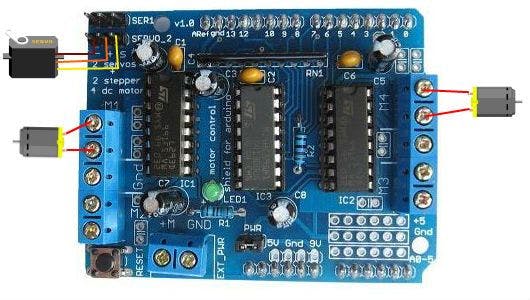
我们将继续讨论电机屏蔽板。该屏蔽罩为电机和伺服电机供电,电机需要大量电流,该屏蔽罩可为每个电机提供高达 600mA 的电流。我们需要在电机屏蔽板上焊接/固定直流电机线。如果你的直流电机线足够长到电机屏蔽会很好,如果不是你可能需要使用外部跳线(无论是公/母跳线),切断跳线头并确保在里面铜线出现。(您需要剪断跳线橡胶以使铜线出现)。您需要将外部电线焊接到直流电机电线上。例子:
然后将左侧电机线连接到电机护罩的 M1 连接器。右电机线将连接到电机屏蔽板的 M3 连接器。例子:

第 6 步:
然后我们需要将红线和黑线的电池开关线连接到电机屏蔽板上。
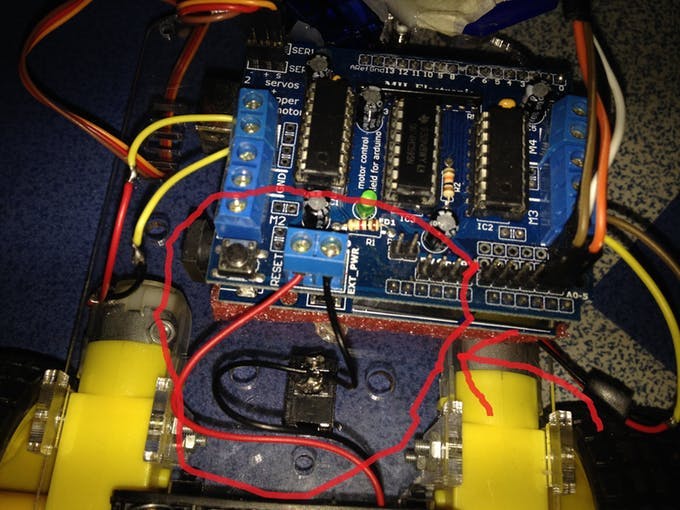
之后,我们需要准备公母跳线,将它们焊接到 5V、GND、模拟引脚 4 和模拟引脚 5。在此之前,我们需要找到相同颜色的母跳线和公跳线并将它们切成两半. 为什么一定要同色?首先,我们很容易识别哪根线是用于哪一部分的。其次,白色公跳线将与连接到5V的白色母跳线焊接。黑色公跳线将与母跳线焊接,公跳线将焊接到 GND。橙色公跳线将与橙色母跳线焊接,橙色公跳线将焊接在模拟引脚 5。最后但并非最不重要的是,棕色公跳线将与母棕色跳线焊接,然后棕色公跳线将焊接到模拟引脚 4。示例:
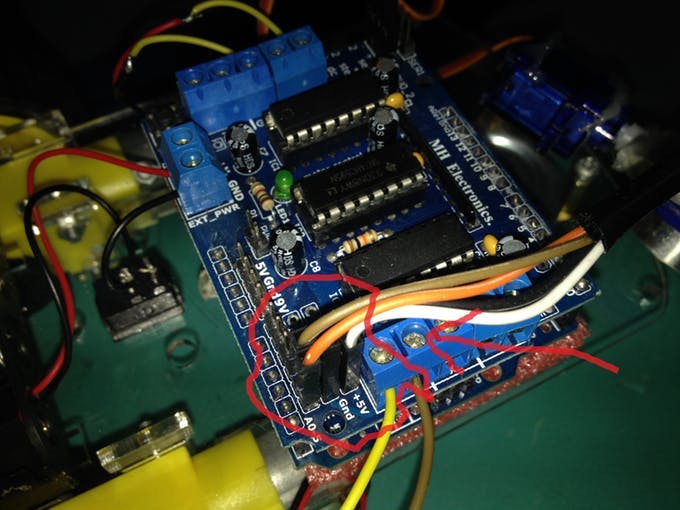
第 7 步:
您可以使用双面胶带或热胶枪将两个防护罩固定在机器人底盘上。
第8步:来到超声波传感器部分
从我们刚刚焊接的母头和公头跳线,白色跳线(5V)(母站点跳线)将连接到超声波传感器 VCC 引脚。黑色跳线(GND)(母站点跳线)将连接到 GND 引脚。棕色跳线(模拟引脚 4)(母站点跳线)将连接到 Echo 引脚。橙色跳线(模拟引脚 5)(母站点跳线)将连接到 TRIG 引脚。

第 9 步:
最后,伺服电机将连接到servo_2插槽。注意*(那里有几种类型的伺服电机。您可能需要在线查找它们如何插入servo_2插槽)。下面是我自己版本的伺服槽。
。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






