
资料下载


二轮自平衡机器人开源设计
386660
分享资料个
描述
我重新设计了机器人。硬件没有改变,但软件已经重新设计。
在旧版本中,每个电机都有一个单独的 PID 控制器。
为了使机器人向右或向左移动,PID 控制器的设定点被分配了适当的值。
如果机器人之后再次直行,则必须人为抵消由此产生的步数差异,这有时会导致一些麻烦。
现在机器人只有一个 PID 控制器用于两个电机。这足以让机器人保持直立。要向前或向后移动,只需将设定值更改为适当的值。
第二个级联 PID 控制器确保机器人保持其到达的位置。
为了让机器人向右或向左移动,在没有输入到 PID 控制器的情况下,两个带相反符号的电机的步数都增加了。
现在我对机器人的行为很满意。
进一步项目手势控制机器人
原则
双轮自平衡机器人代表一个机器人平台,有两个独立驱动的轮子,重心在轮子旋转轴上方。机器人的行为类似于倒立摆的经典机械系统。
机器人特点
使用蓝牙通过操纵杆控制机器人
步进电机,单极/双极,200 步/转,42×48mm,4V,1.2A/相
步进电机驱动器载体可以连续提供每相高达 1.5 A 的电流,四种不同的步进分辨率:全步、半步、1/4 步和 1/8 步。
用于电机和位置的级联 PID 控制器
通过中断的任务分配器
脉宽调制控制器
带加速度计和陀螺仪的 MPU-6050 传感器,使用带 MPU-6050 的数字运动处理
通过 Twiddle 算法自动调整
电池控制
面向对象的软件设计
限制
仅在 Arduino Due 运行
步进电机
我决定使用 Stepper 引擎,因为它们具有以下优势:
定位准确,无累积误差
静止位置保持力矩
无因电机转动惯量引起的减速/滞后
通过计算 PWM 信号进行简单的位置感测
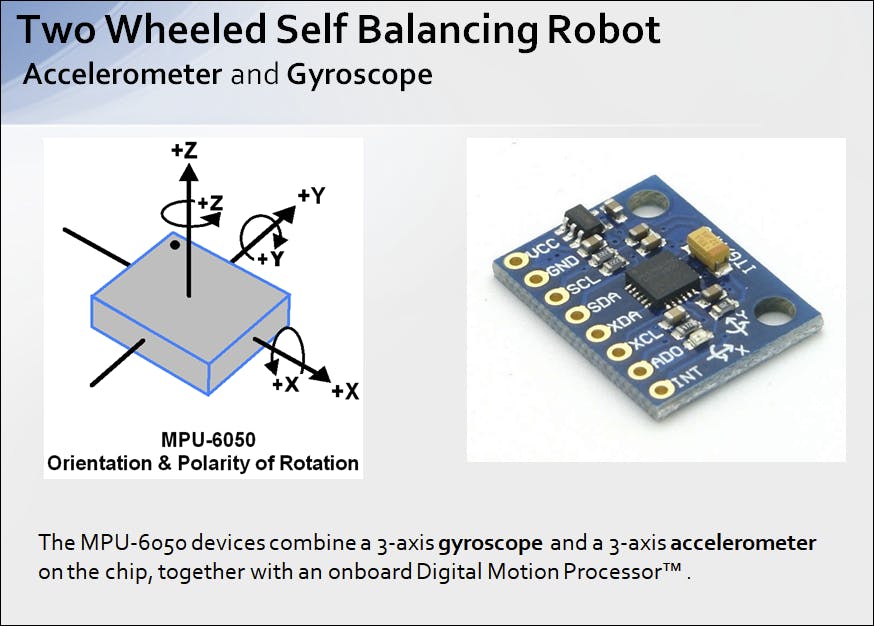
MPU-6050加速度计+陀螺仪
MPU-6050 传感器在单个芯片中包含一个 MEMS 加速度计和一个 MEMS 陀螺仪。它非常准确,因为它包含用于每个通道的 16 位模数转换硬件。它同时捕获 x、y 和 z 通道。传感器使用 I2C 总线与 Arduino 连接。
我使用带有 MPU-6050 传感器的 DigitalMotion Processing,直接在芯片上进行快速计算。这减少了 Arduino 的负载。
https://playground.arduino.cc/Main/MPU-6050
由于我的板的方向,我使用了根据来自 FIFO 的四元数计算的偏航/俯仰/滚动角度(以度为单位)。通过阅读欧拉角,我遇到了万向节锁的问题。
MP6500步进电机驱动器载体
使用的步进电机驱动器可让您以每相高达约 1.5 A 的电流连续控制一个双极步进电机,无需散热器或强制气流(数据表)。
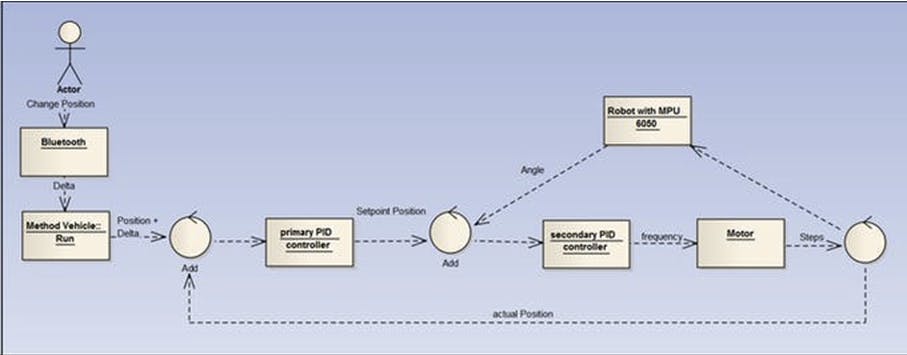
级联PID控制器
机器人由级联 PID 控制器控制。电机控制器确保机器人保持直立。位置控制器确保机器人保持其正确的设定点规定位置。
级联控制是多个控制器级联;相关的控制循环相互嵌套。一个控制器(主控制器、位置)的控制器输出变量用作另一个(从控制器、电机)的参考变量。
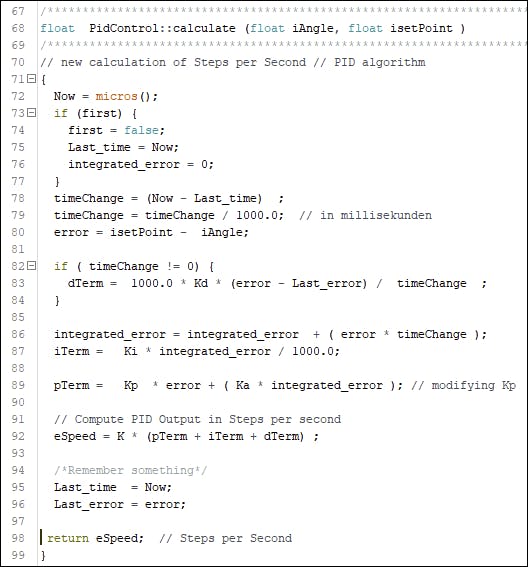
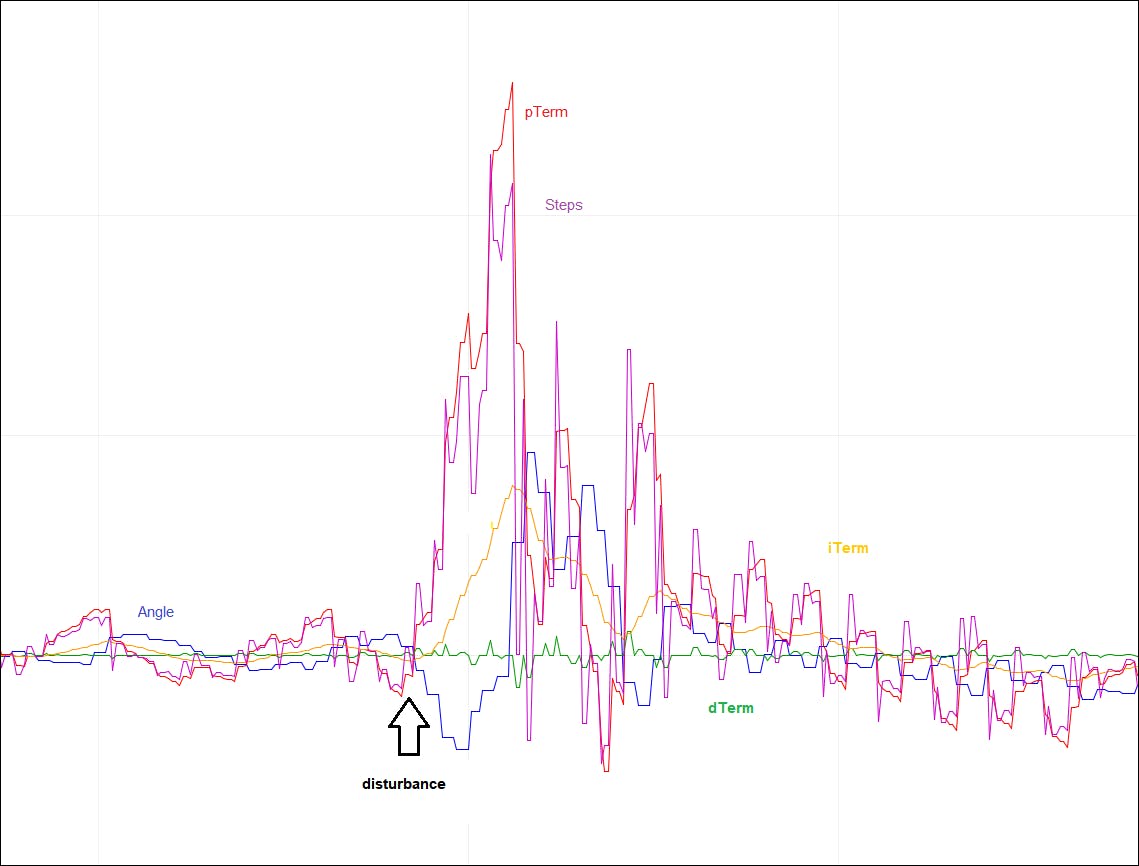
标准 PIDalgorithm 在较长的测试系列后略有修改。向 P 分量添加参数 Kx 乘以 I 分量。
在此更改之前,机器人总是想逃跑。I 部分的简单增加使机器人不稳定。这个解决方案当然在很大程度上取决于机器人的结构(重量、重心等)。

PID控制器
PID控制器
PWM控制器
为了生成 PWM 信号,我修改了“randomvibe”库。( https://github.com/cloud-rocket/DuePWM )。PWM 控制器在 DuePWMmod 类中实现。通过 PWM Clock-A (“CLKA”) 设置的独特频率) 和时钟 B ("CLKB")。
任务调度
任务派发:
机器人
液晶显示器
绘图仪
是在 Ivan Seidel 的定时器库的帮助下完成的。(https://github.com/ivanseidel/DueTimer感谢)生成三个具有相应时间的中断来调用任务。
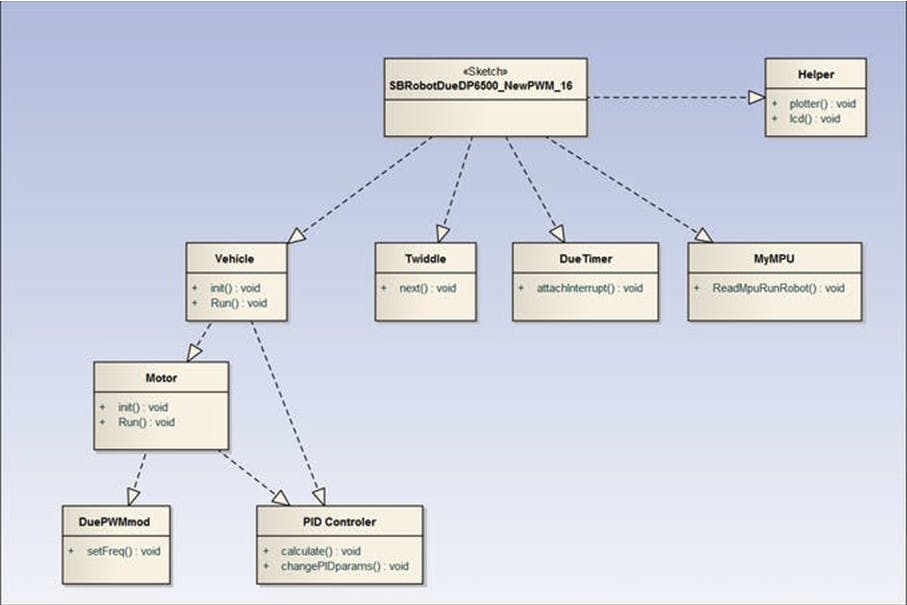
软件架构
机器人由主程序SBRobotDue02和以下类组成:
控制
电池
由于PWMmod
到期计时器
玩转
发动机
车辆
我的MPU
以及以下内容:
配置
液晶显示器
Pid参数
绘图仪
该体系结构显示在以下 UML 图中:
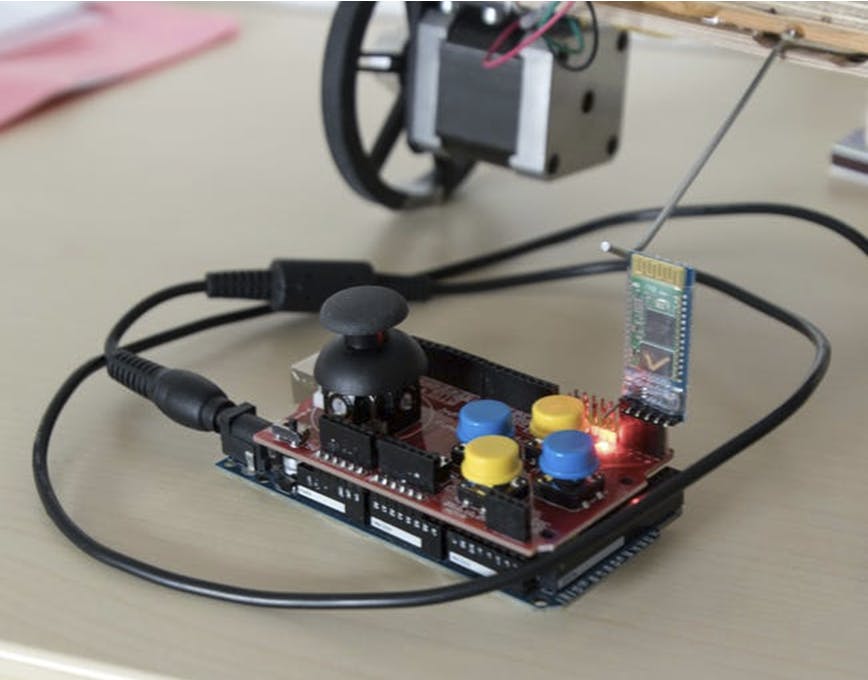
操纵杆
Funduino Joystick Shield V1.A 用于全方位控制机器人。盾牌使用的是 Arduino Mega。来自屏蔽的数据是通过蓝牙连接上的串行事件接收的。JoyStickSlave01 草图会在发生变化时立即向机器人发送数据。
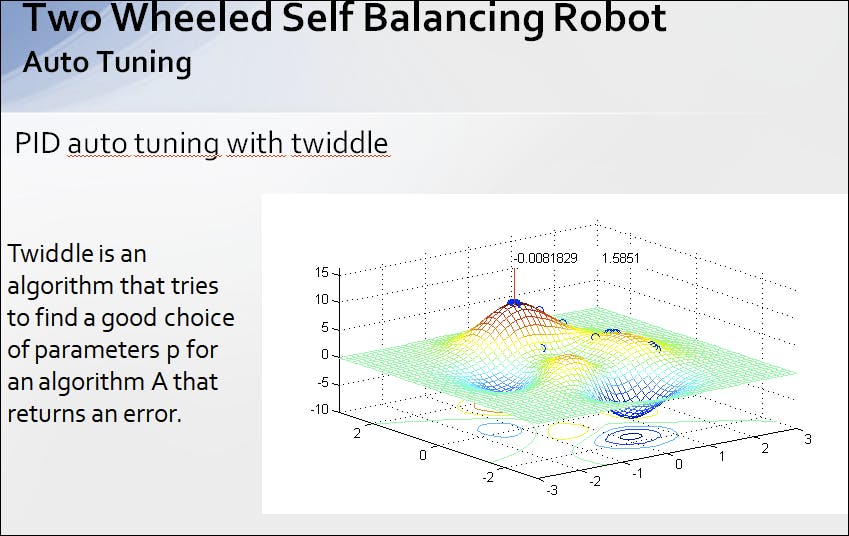
使用 Twiddle 进行 PIDauto 整定
Twiddle 是一种算法,它试图为算法找到一个好的参数选择。也称为爬山,它类似于登山者在浓雾中寻找山顶,并引导他的脚步尽可能陡峭地上坡。如果只向四面八方下降,他就到达了顶峰。Twiddle算法用于PID参数的自动整定。首先,可以通过使用电位计进行手动调整来测试参数。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




