
资料下载


如何制作WiFi控制的自平衡机器人
48674
分享资料个
描述
我已经在家里使用 ESP8266 制作了很多 wifi 控制的机器人。现在,我决定制作相同的 wifi 控制机器人,但升级版本。所以在这里我要做一个自平衡机器人。我真的希望这会比以前更有趣。所以,让我们一起来吧……
是的,当然我已经尝试让它尽可能简单,并确保任何人都可以通过本教程使其变得简单......
您将从本教程中学到什么
- 关于节点 MCU
- 如何在 esp8266 中上传代码
- 约 l298n
- 什么是自平衡机器人
- PCB的制作方法
- 为什么我们要在我们的项目中使用 PCB
- 如何通过手机控制机器人
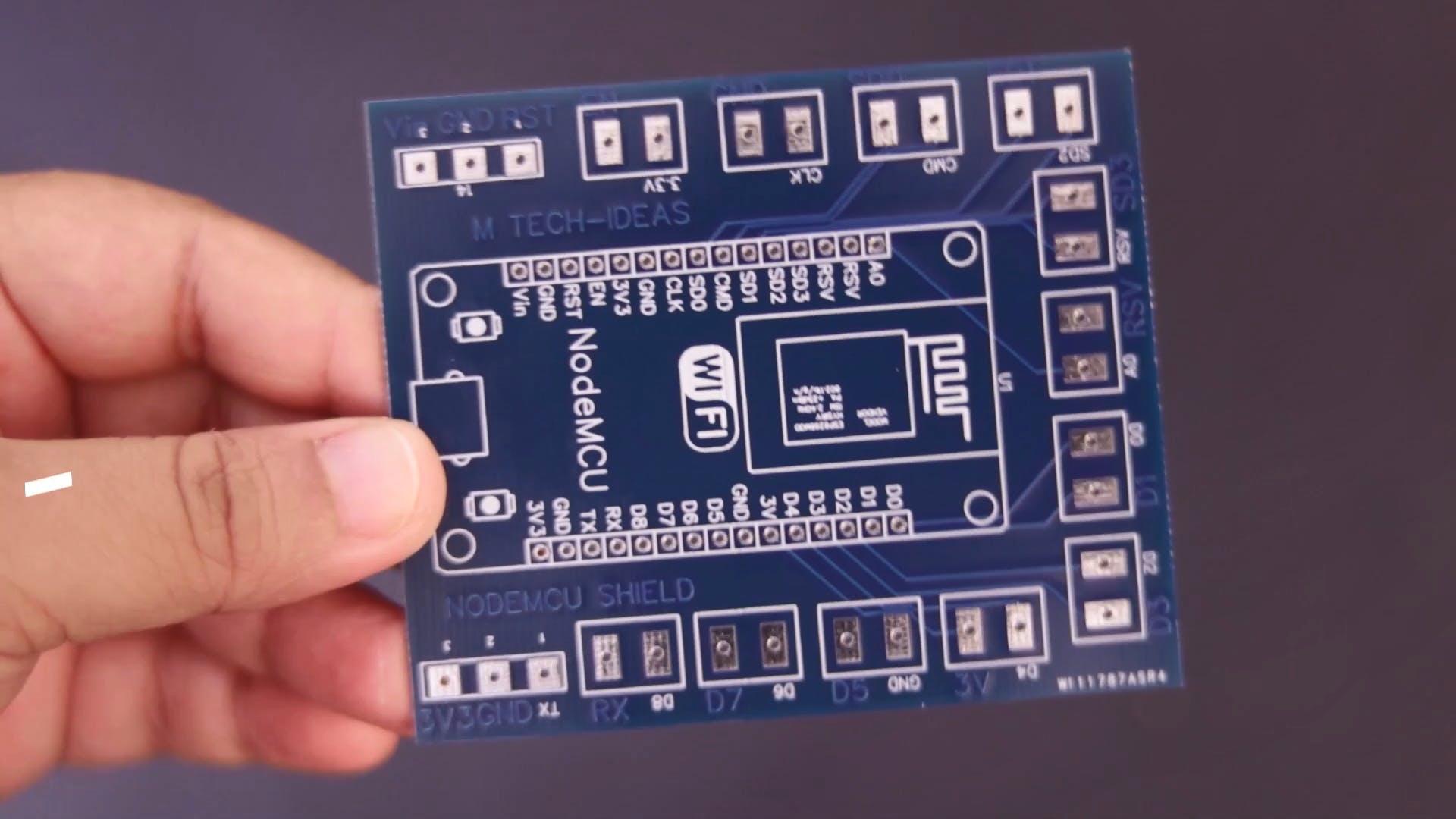
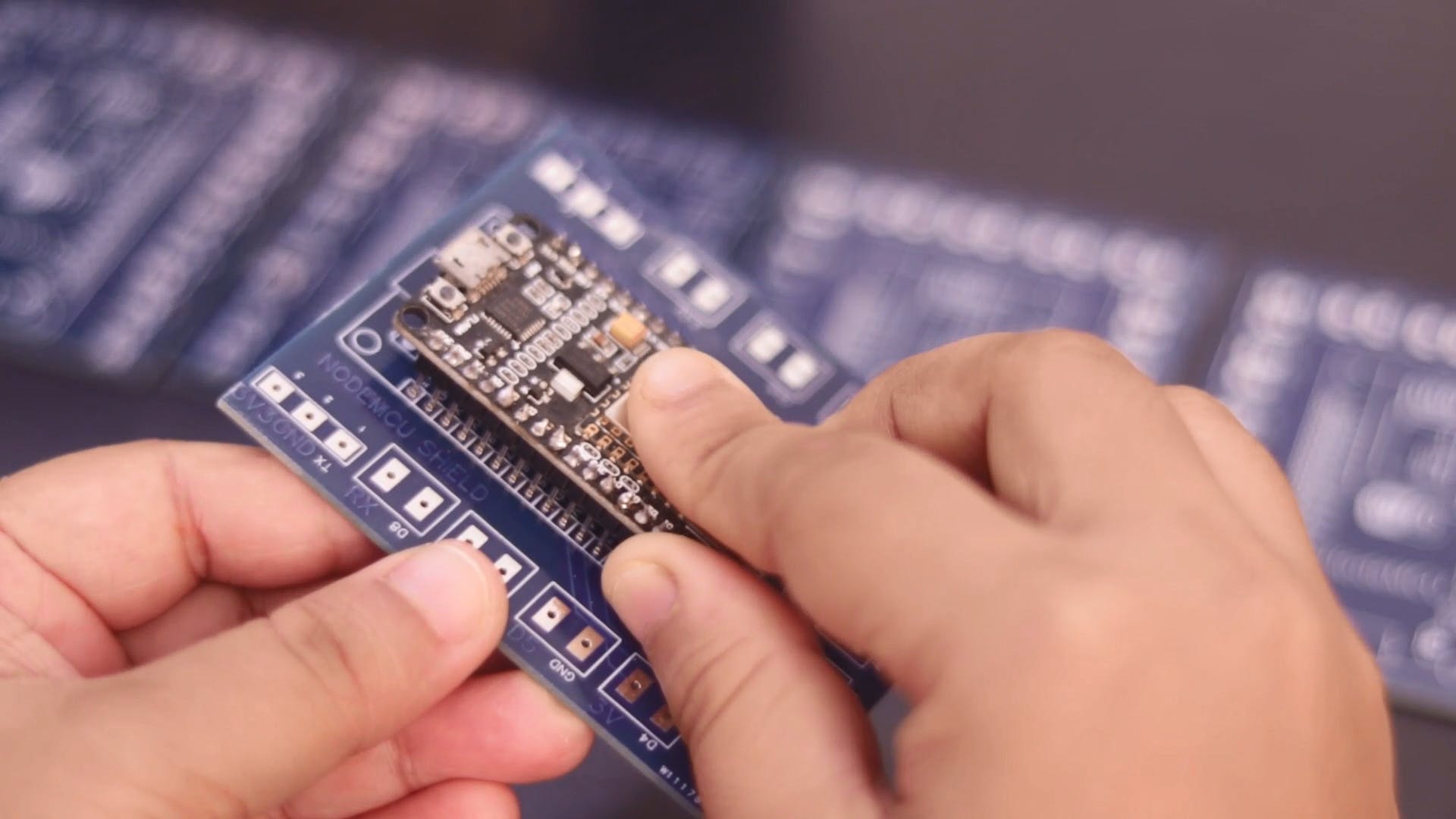
节点单片机
NodeMCU 是一个开源的物联网平台。它包括在 Espressif Systems 的 ESP8266 Wi-Fi SoC 上运行的固件,以及基于 ESP-12 模块的硬件。默认情况下,术语“NodeMCU”是指固件而不是开发套件。固件使用 Lua 脚本语言。
为什么在物联网项目中使用节点 MCU/ESP8266?
ESP8266 具有非常低的成本和高功能,使其成为物联网 (IoT) 的理想模块。它可用于任何需要将设备连接到本地网络或互联网的应用程序。NodeMCU 开发板/套件 v1。0 (Version2) NodeMCU 是一个类似 Arduino 的设备。
如何在 Node MCU 中上传代码?
请按照以下步骤操作,如果您是新手并且不熟悉此 ESP8266 模块,或者在上传代码时遇到问题
1.首先从下面的链接下载代码。现在打开 Arduino 并转到 File~New。
2.现在将出现一个新窗口。接下来,删除所有现有代码并粘贴给定的代码。
3.在代码中,您会发现 Additional Board Manager URL 现在复制 URL 并执行下一步。对于不同的操作系统,您有不同的选择。MAC:转到 Arduino ~ 首选项 Windows:Fille ~ 首选项
4.现在将其粘贴到 Additional Board Manager URL 部分,然后按确定。现在去工具~板~板管理器搜索“ESP8266”并安装最新版本。
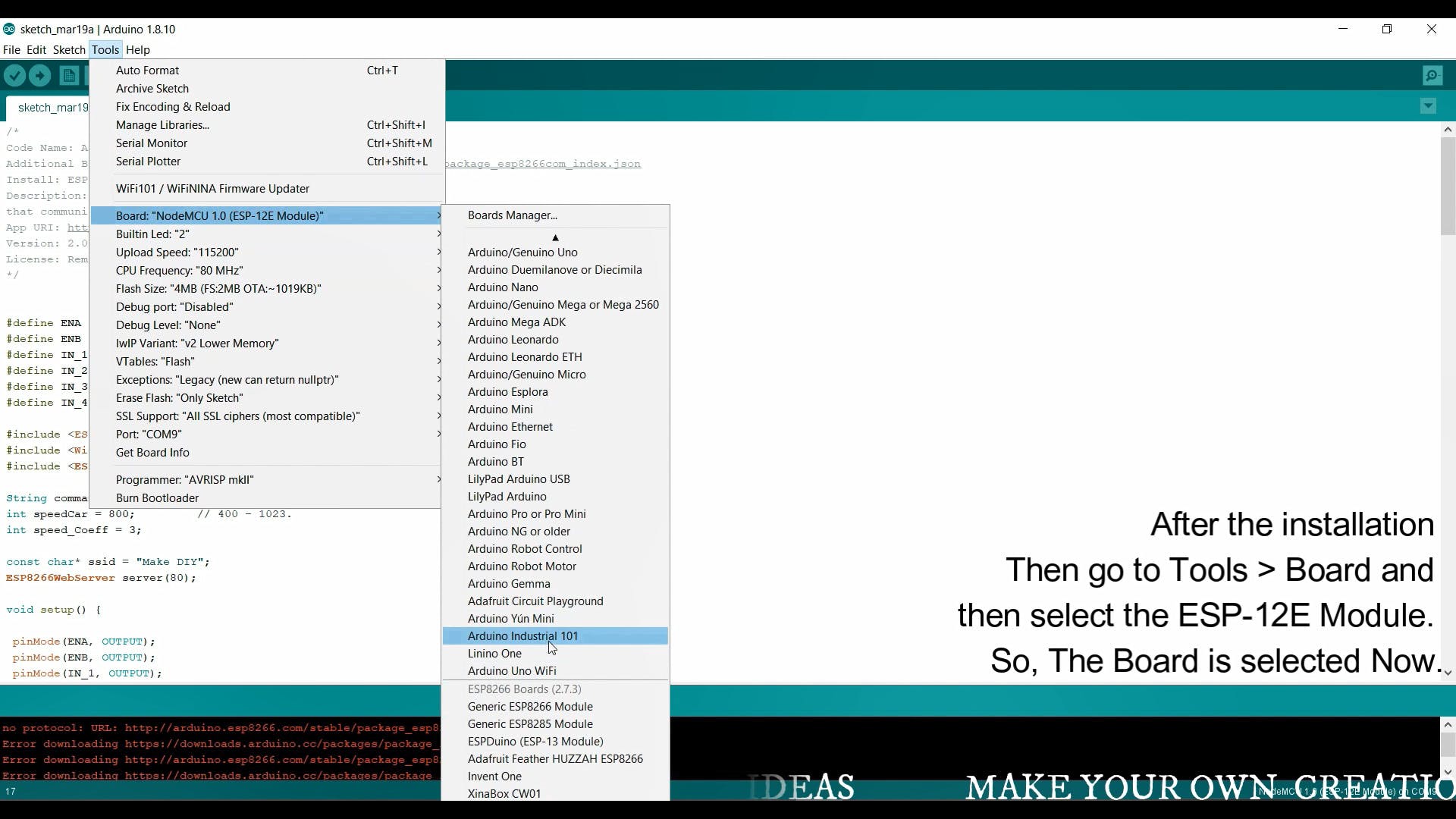
5.安装完成后进入Tools~Board,选择ESP-12E Module。因此,现在选择了董事会。
6.下一步,选择正确的 COM 端口。
7.然后先编译程序,然后上传到NodeMCU。几秒钟后,代码将被编译,然后上传到 NodeMCU Car。
什么是 L298N,为什么要使用它?
L298N 是采用 15 引脚多瓦和 PowerSO20 封装的集成单片电路。它是一种高压、大电流双全桥驱动器,设计用于接受标准 TTL 逻辑电平沙驱动感应负载,如继电器、螺线管、直流和步进电机。
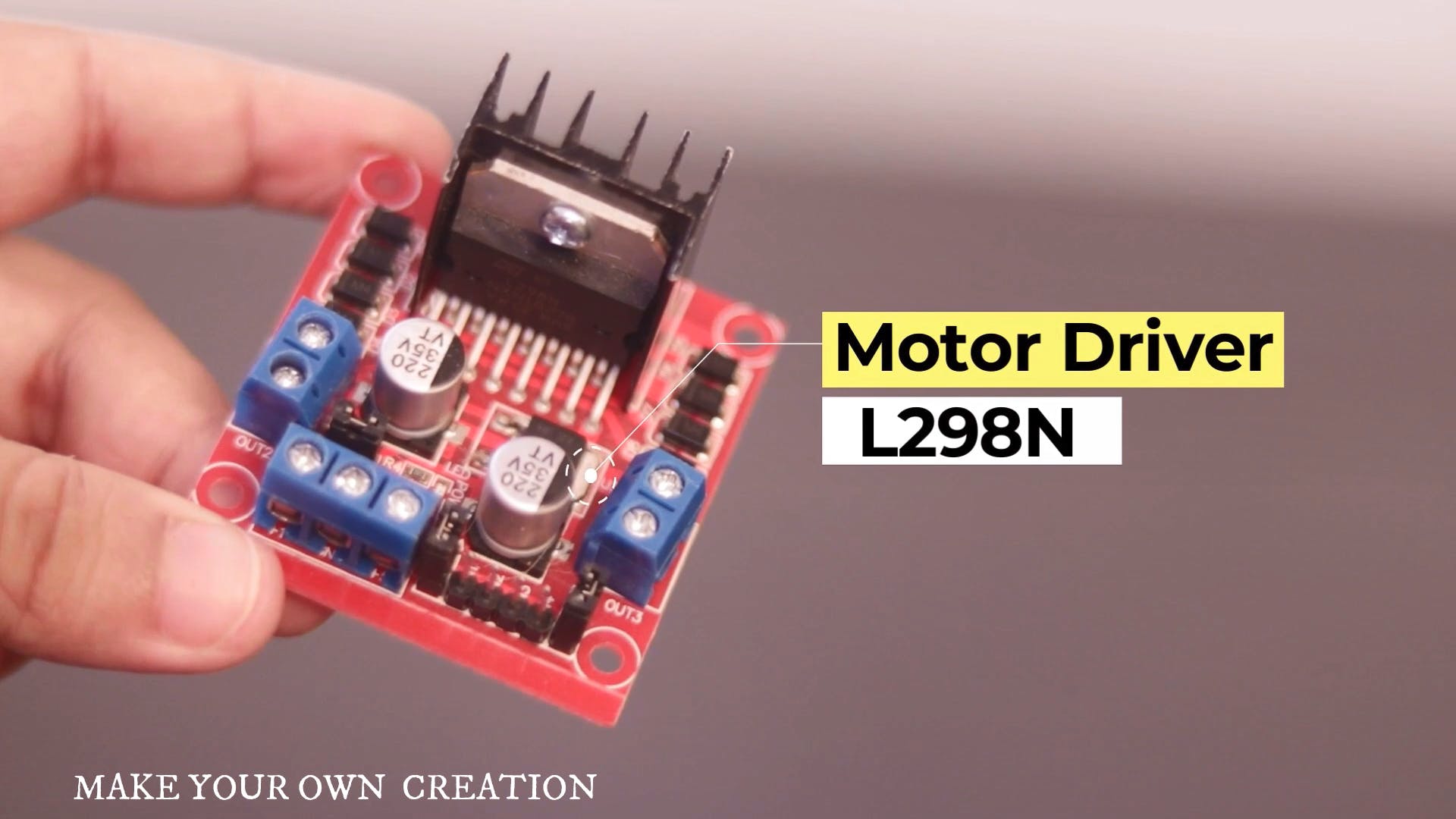
L298N 是一款双 H 桥电机驱动器,可同时控制两个直流电机的速度和方向。该模块可驱动电压在 5 至 35V 之间的直流电机,峰值电流高达 2A。
什么是自平衡机器人?
两轮自平衡机器人代表一个机器人平台,具有两个独立驱动的轮子,重心位于轮子旋转轴的上方。机器人的行为类似于倒立摆的经典机械系统。
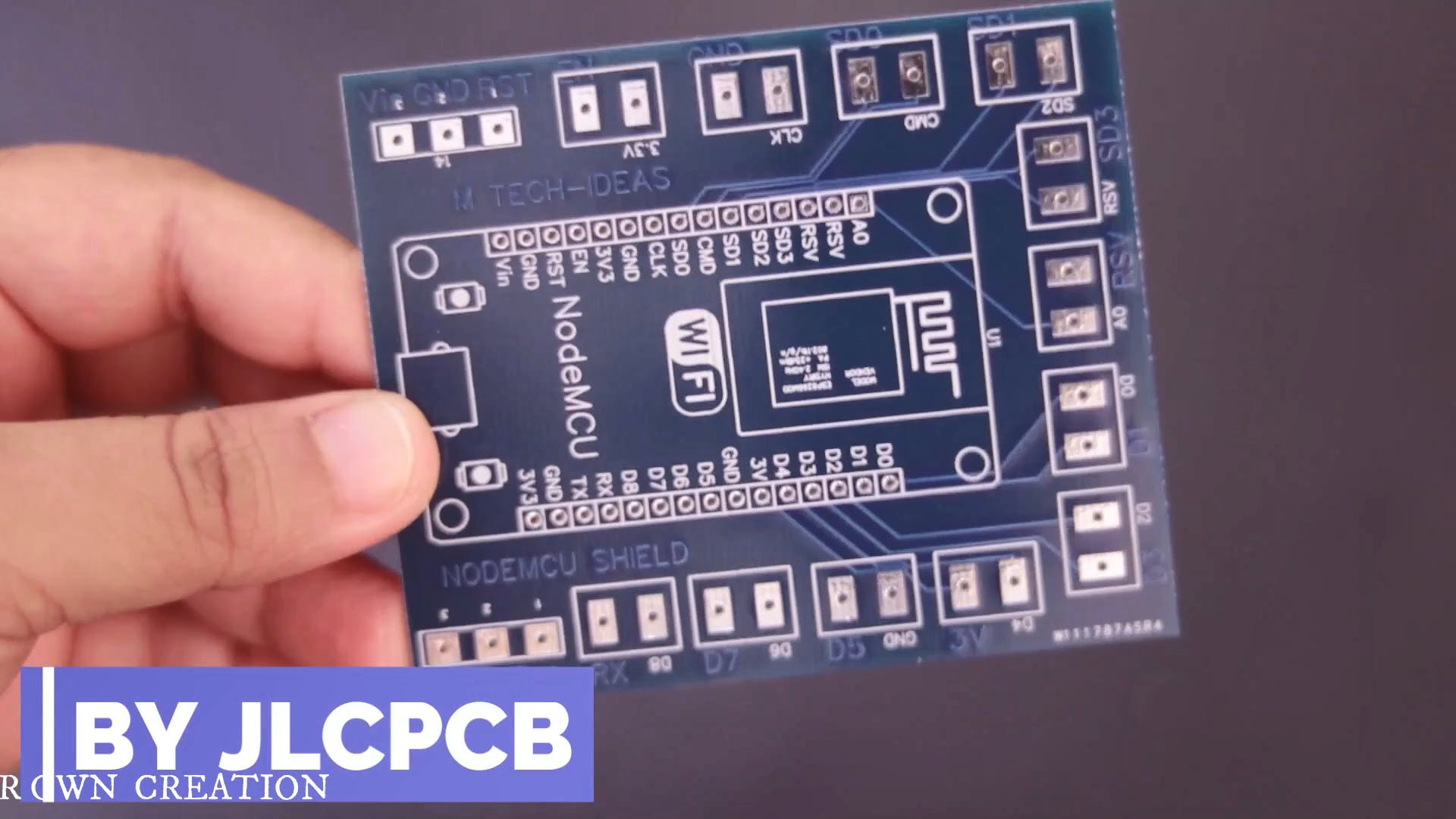
印刷电路板是什么意思?
印刷电路板
印刷电路板、PC 板或 PCB,是一种印刷或蚀刻有导电线的非导电材料。电子元件安装在板上,走线将元件连接在一起以形成工作电路或组件。
为什么我们要在项目中使用 PCB?
有效的 PCB 设计有助于减少出错的机会以及短路的可能性。随着技术的日新月异,PCB 在当今时代发挥着至关重要的作用。这些电路板是电子产品的基础,因为它们几乎用于所有电子设备。
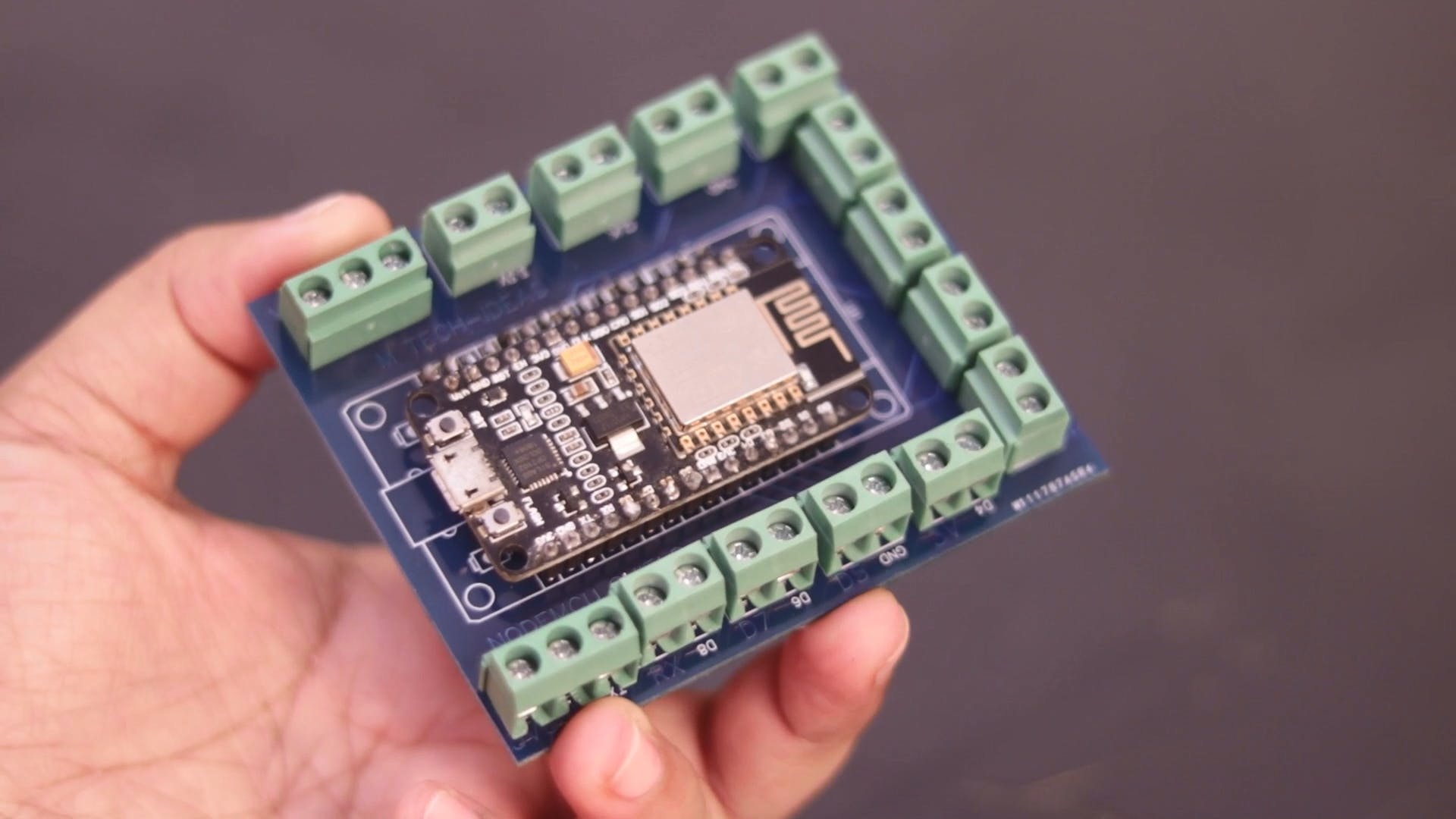
如何轻松制作PCB板?
在家制作PCB板是可能的,但制作起来非常困难并且需要很多时间。但是,如果您从任何 PCB 制造公司购买它们,这真的很容易。通常,我在EasyEDA中设计电路图和Garber文件()在我的情况下,我总是更喜欢使用JLCPCB的服务来制作我想要的PCB板。他们非常专业,也提供非常快速的交付,帮助我在短时间内完成我的项目。我还想分享一件事,即;他们的PCB板制作价格真的很低。他们还提供了这张优惠券,我通过它只支付了最低金额的费用。在我的下一个项目中,我将使用他们的JLCPCB SMT服务将满足我节省金钱和时间的需求。我可以制造任何东西,因为他们有超过200k+ 的库存组件。作为一名电子工程师和项目制造商,我几乎总是更喜欢使用 PCB 制作我的电子项目,如果你问我个人的选择,JLCPCB是我制作定制 PCB 的最佳选择
如果您通过此链接注册:https ://jlcpcb.com/IAT或通过 JLCPCB注册将其设为会员链接, 注册成功后可获得 $27 优惠券。
如何组装硬件零件?
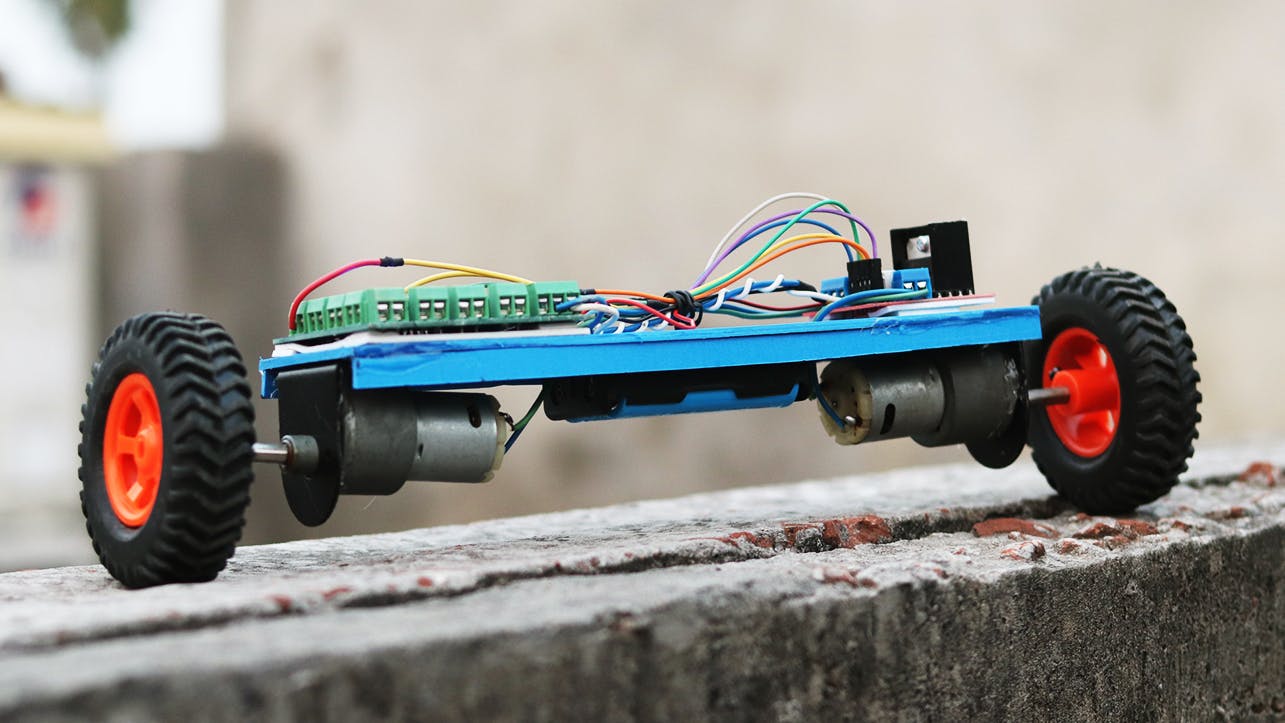
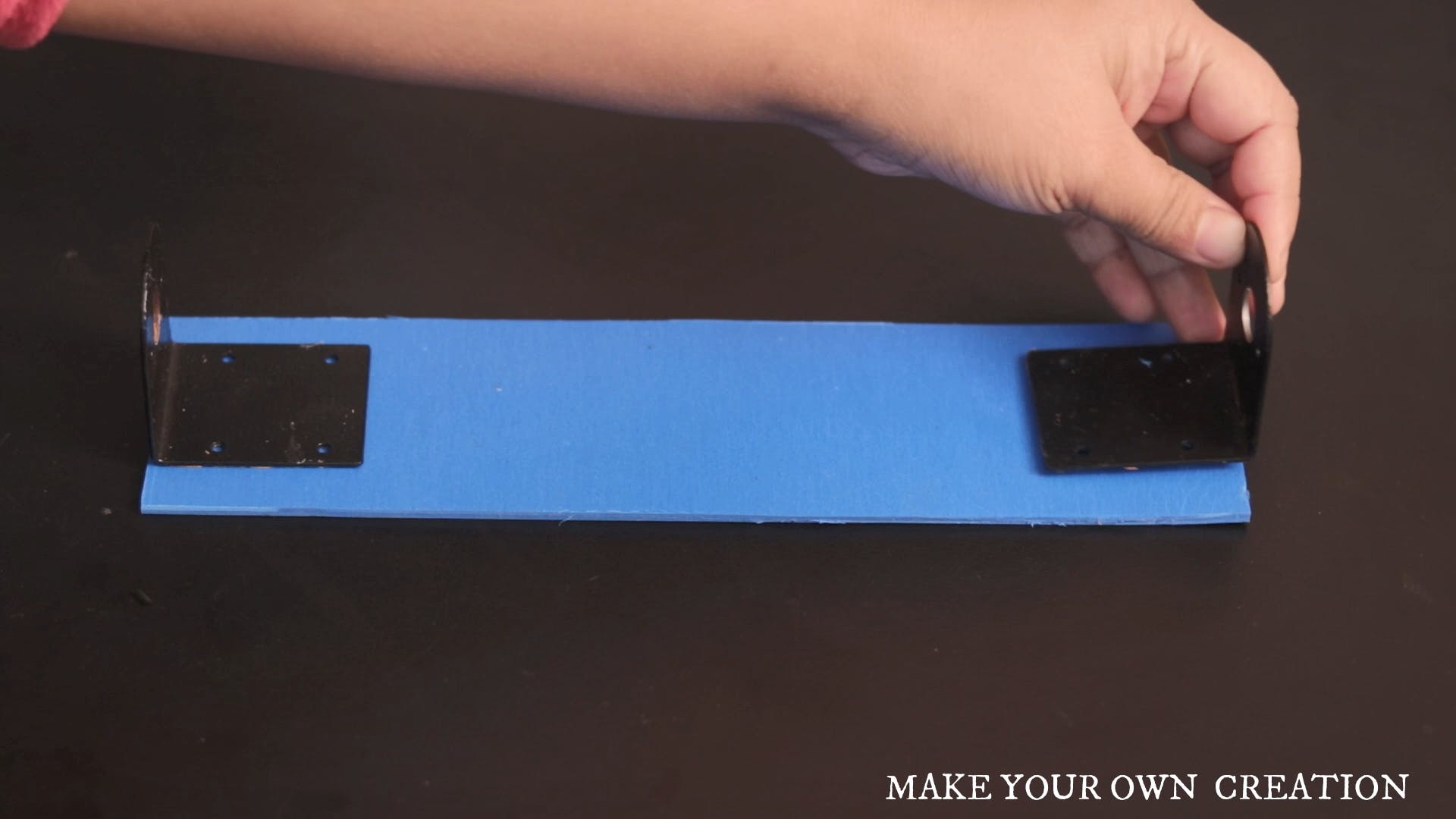
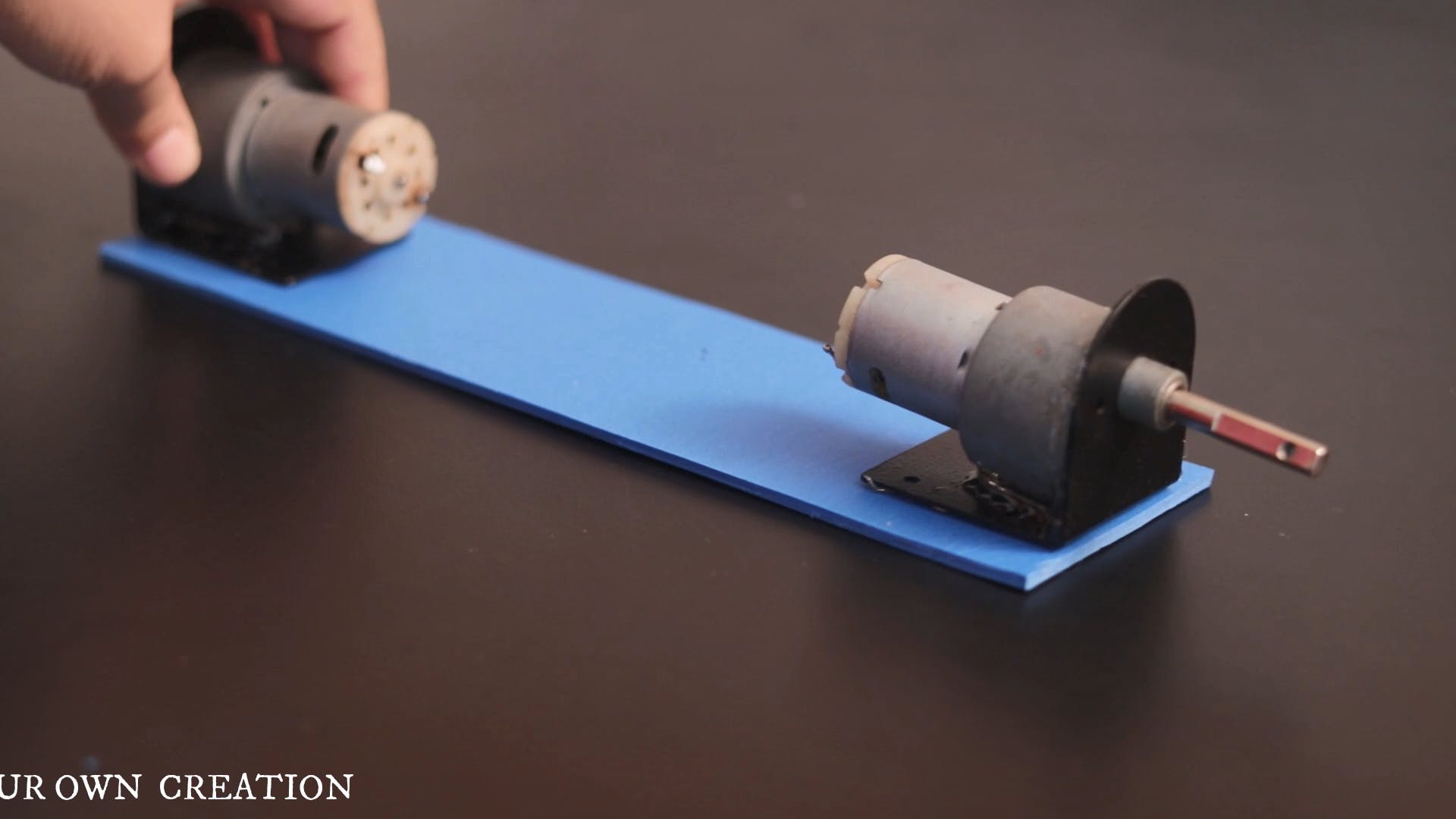
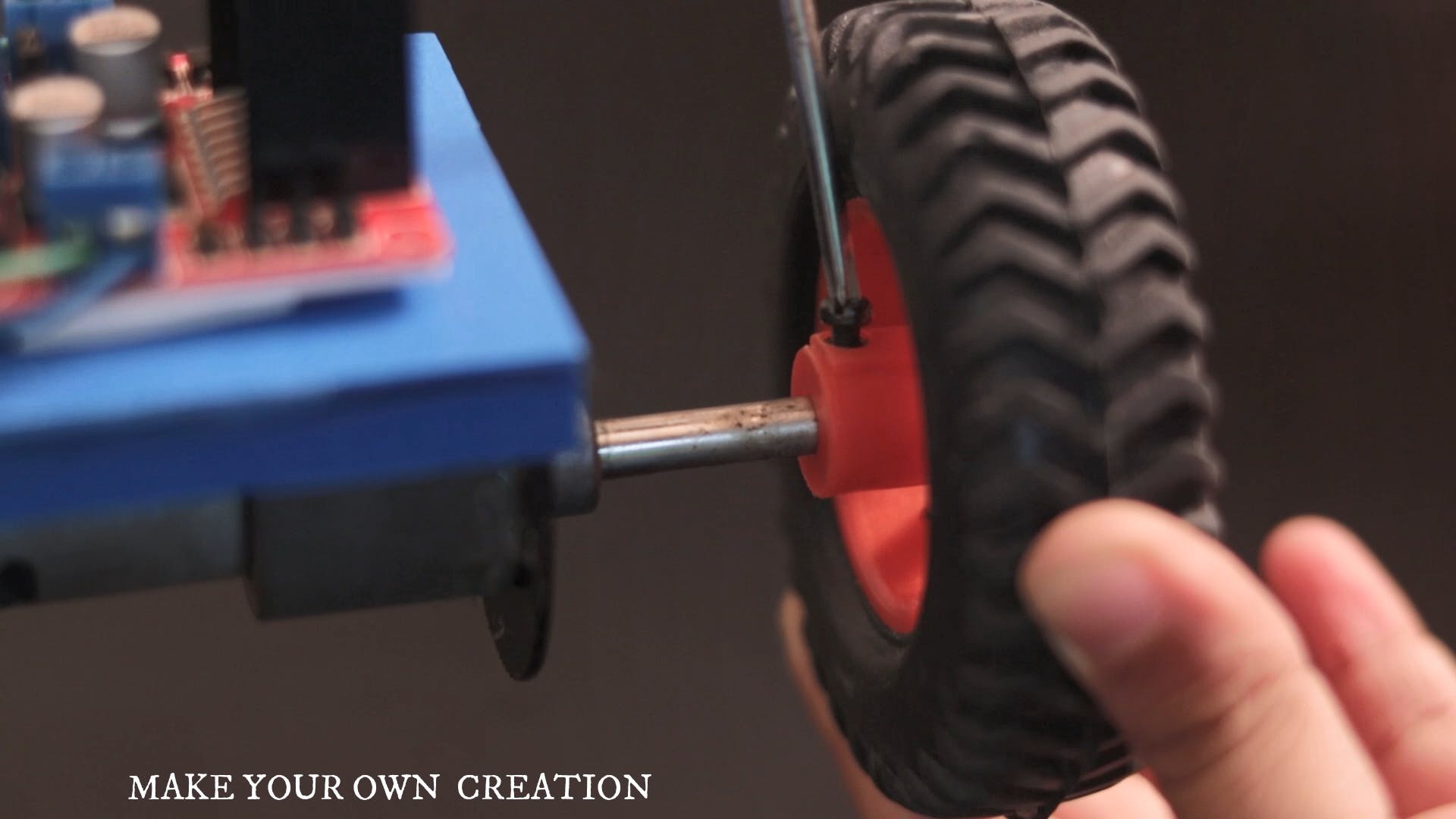
在这一步中,我们首先要制作机器人底盘。为此,我将使用一小块 PVC 板来制作机器人底盘。然后我用夹子和一些热胶连接了两个 500rpm 齿轮马达。然后我将轮子连接到电机端子并正确拧紧螺钉。
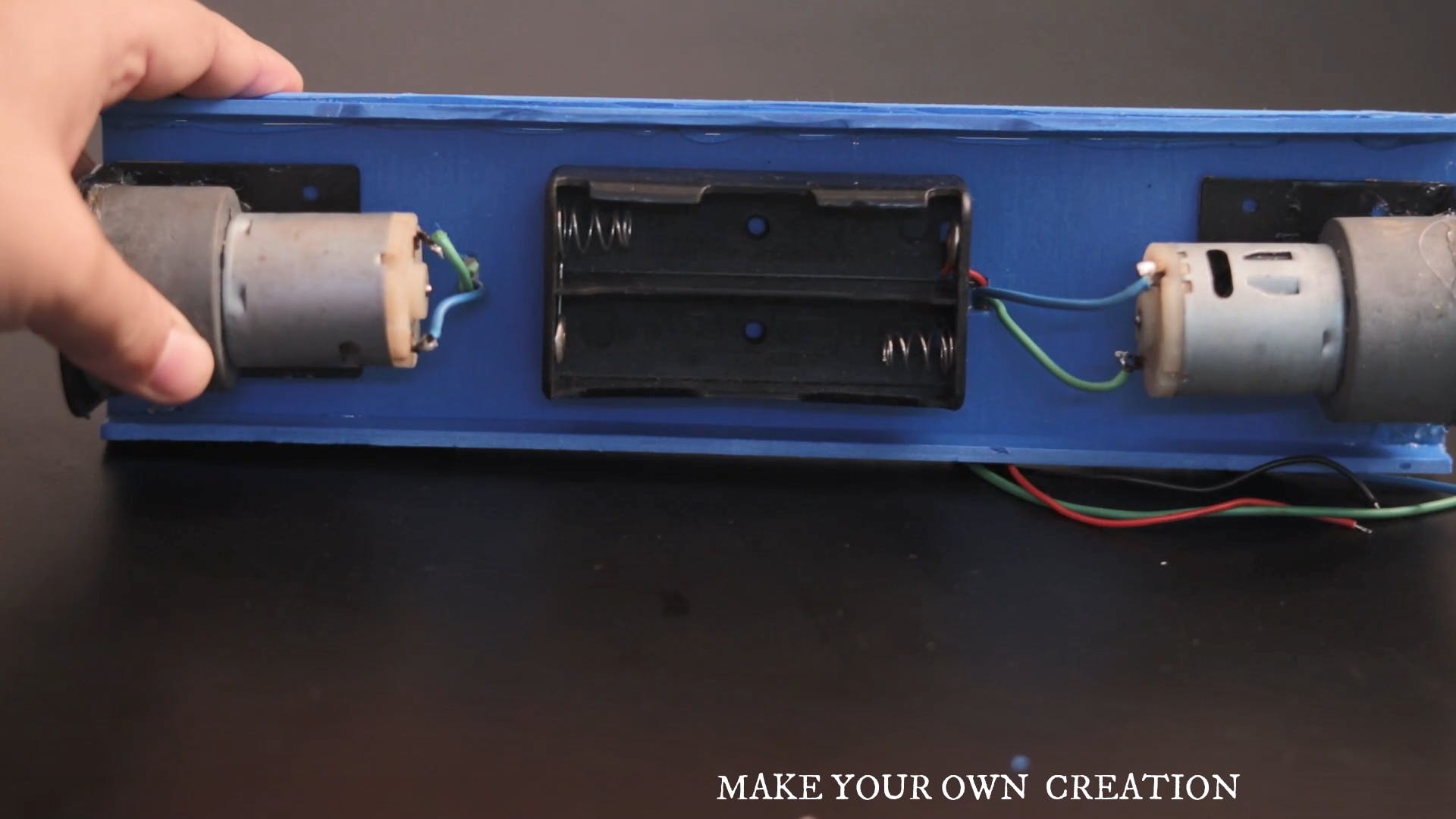
然后我使用双面胶带将 18650 锂离子电池座与机器人底盘连接起来。
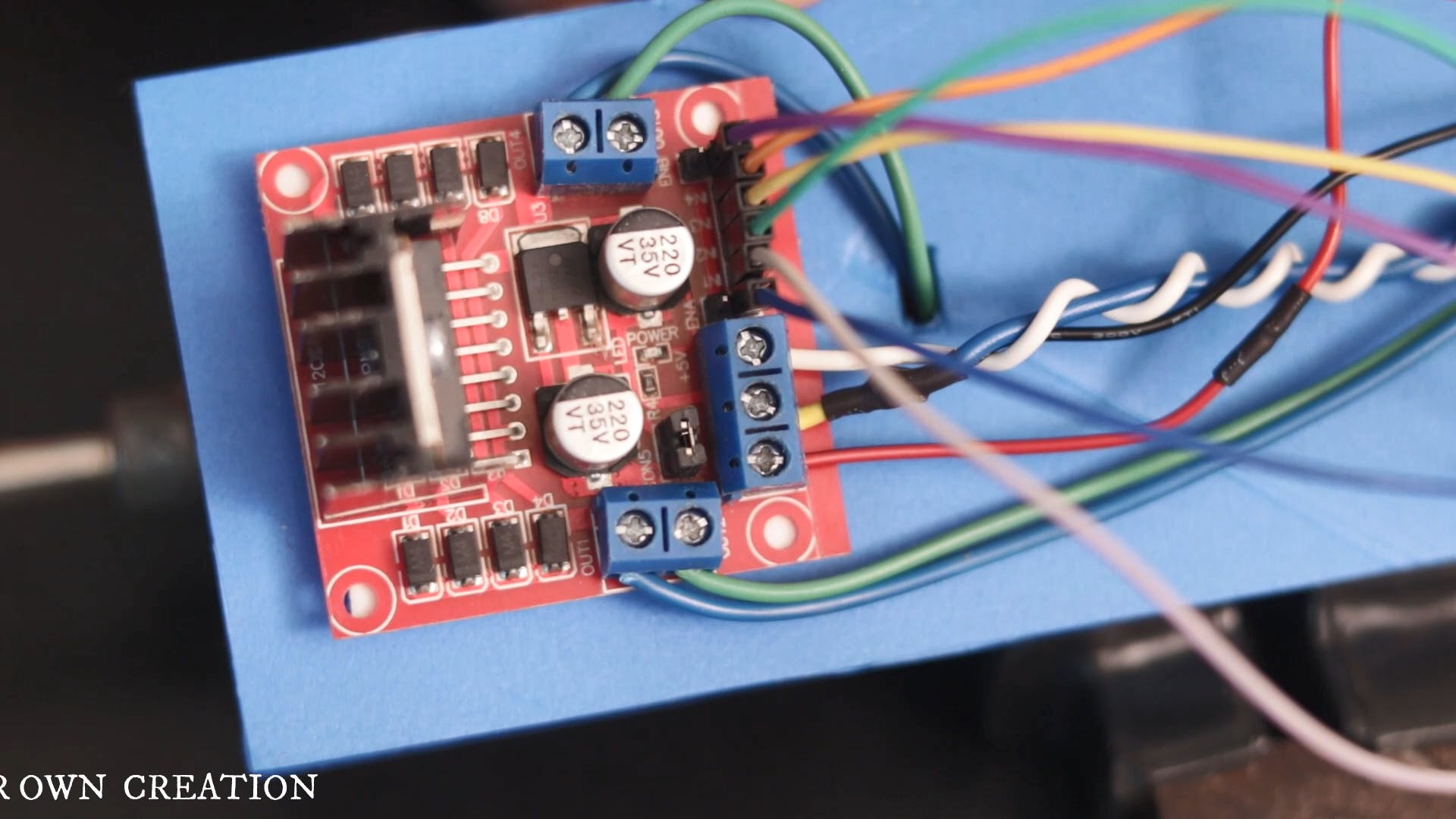
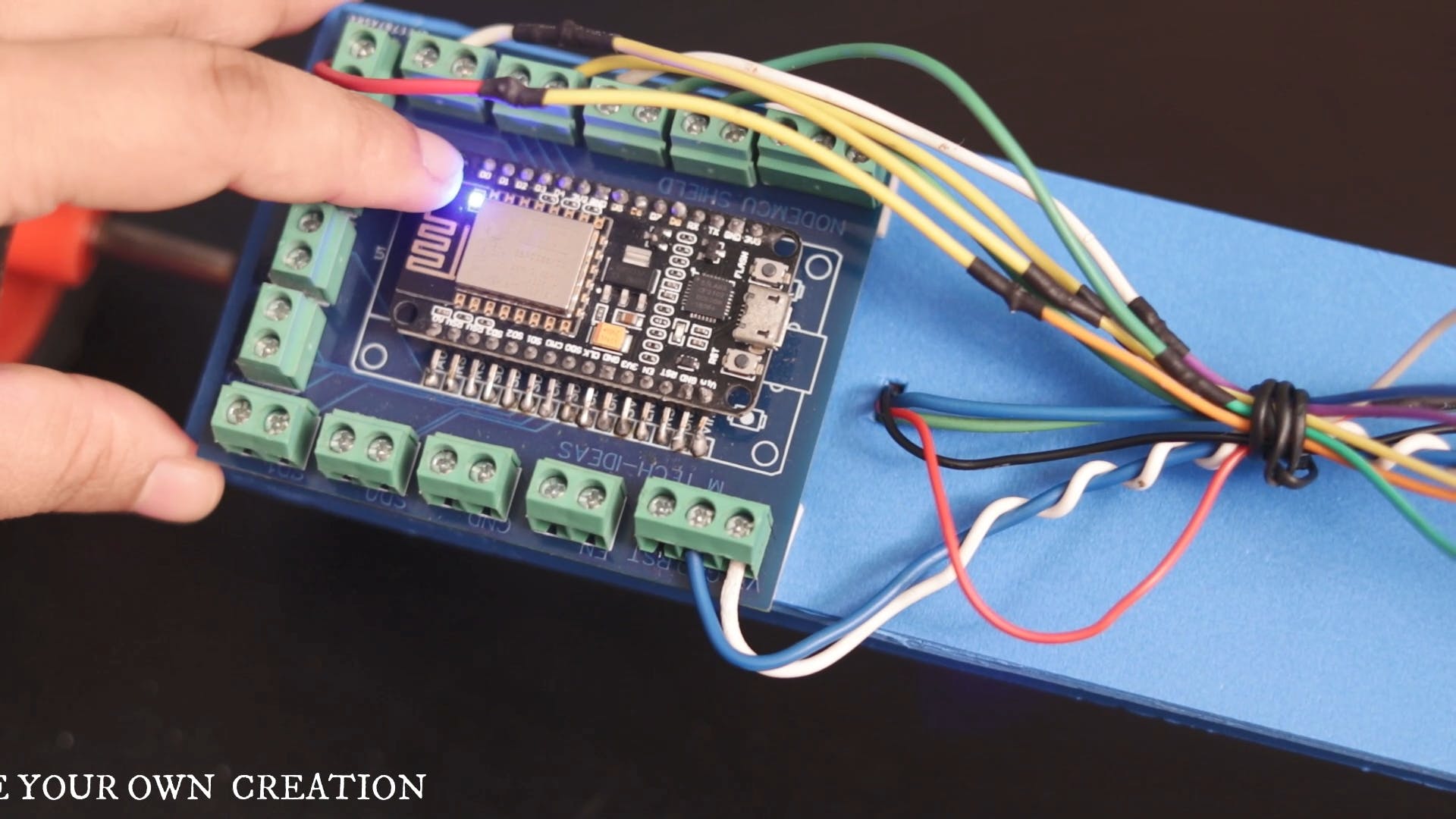
接下来,我将一些电线连接到电机的正负极端子上,然后将端子与l298n电机驱动模块连接。
现在我按照电路图进行了其他连接。
我已经随本文提供了电路图供您参考。

如何使用智能手机控制机器人?
这是该项目的最后一步。按照步骤成功制作机器人后,您必须在 Android 手机上安装名为“NodeMCU_Car”的软件,该软件可在 Play-store 中轻松获得。

安装成功后,请按照步骤操作-
- 打开手机的wifi
- 搜索可用的网络。在这里,在这种情况下,名称将是“Monalisa 的 Wifi 机器人”
- 连接可用的网络
- 现在打开名为“NodeMCU_Car”的安卓应用
- 现在与机器人连接
- 因此它连接成功。让我们和机器人一起玩吧。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





