
资料下载


用于Arduino Due的DIY Braccio机器人手臂护罩
123
分享资料个
描述
介绍
我的第一个机械臂是Arduino TinkerKit Braccio 。随着我对机器人手臂的了解更多,我产生了使用反向运动学库并连接到机器人操作系统 (ROS) 等方面的愿望。在具有更大处理器和更多内存的微控制器上,这些目标变得比 Braccio 设计的屏蔽所提供的 Uno 更容易。我选择了 Arduino Due 作为微控制器的下一个迭代。
现在我必须想办法制作一个向后兼容的替代 Braccio 盾牌,以适用于 Arduino Due。
设计
对于电子产品来说仍然相对较新,我更喜欢使用现成的模块为伺服系统提供次级更高电流的电源。我知道我必须小心保护 3.3V Arduino Due 免受 Braccio 伺服器的更高电压和电流(5V 4A)的影响,我有点担心自己设计它。
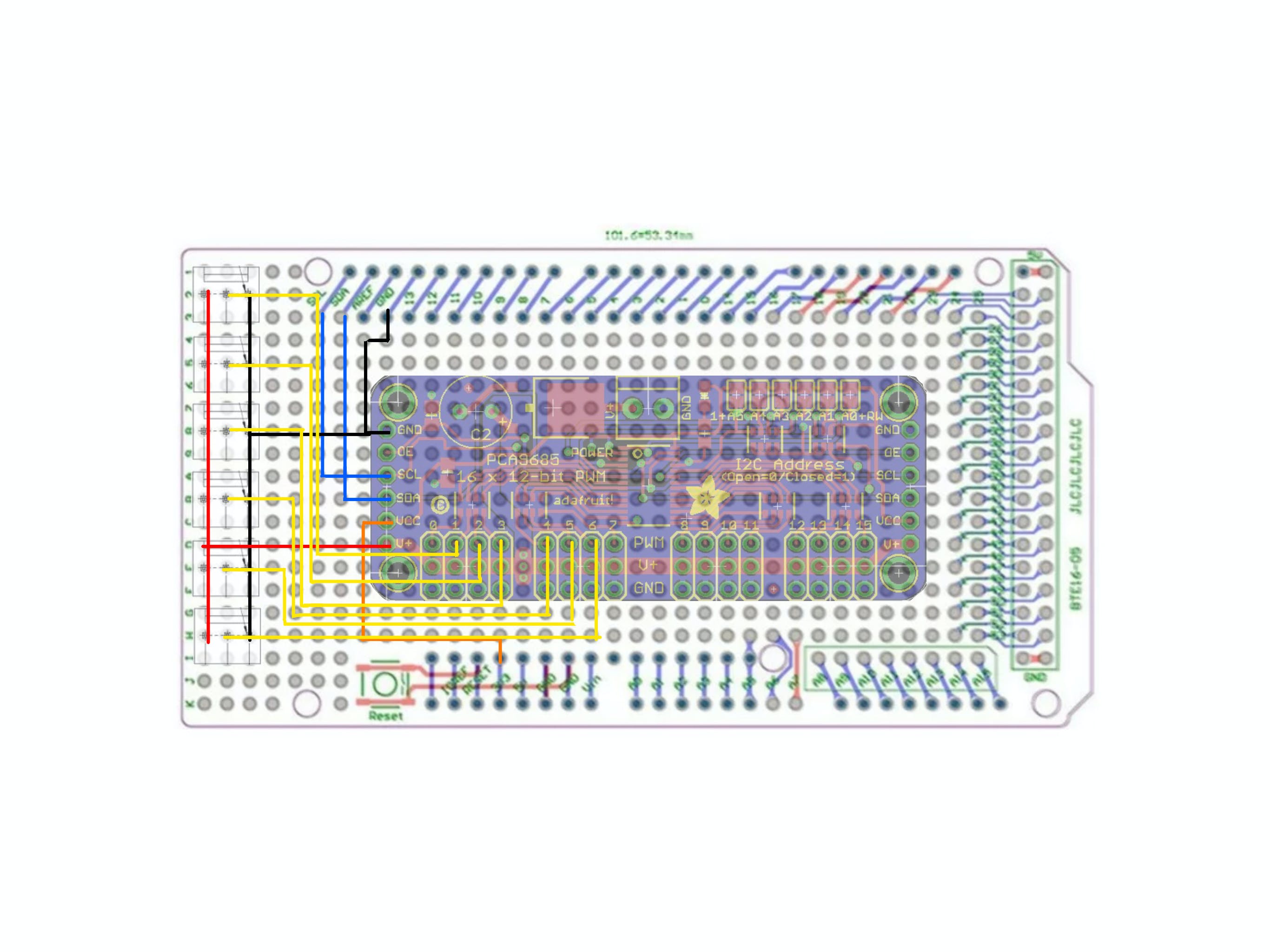
我选择了一个基于 I2C 的Adafruit 模块。我通过研究和测试发现,该模块在逻辑端兼容 3.3V,同时在伺服端仍然能够提供 Braccio 标准的 5V 4A 电源。这种方法的一个有趣的副作用是输出到每个伺服系统的 PWM 信号具有 3.5V 的 Vpp(电压峰峰值),伺服系统仍将其识别为高 TTL 逻辑电平。
Arduino Due 尺寸的原型设计护罩旨在作为 Adafruit 模块和伺服引线连接器的简单安装机制。唯一需要的 Arduino Due 引脚是 I2C 线接口和逻辑电路的电源。选择Wire1只是为了保持连接整洁和最小化(Arduino Due 有两个 I2C/wire 接口)。
- D71 (SCL1) 连接到 PCA9685 SCL
- D70 (SDA1) 转 SDA
- 3V3 转 Vcc
- 地到地
找到原始 Arduino Uno Braccio 屏蔽上使用的特定三线连接器是保持物理兼容性的关键。这些被确定为 Molex KK-254(也称为 KF2510)连接器。重要的是要注意,与大多数其他爱好者伺服器相比,Braccio 连接的接线是非常规的。您不能只修改 Braccio 伺服连接器并将它们直接插入 PCA9685 模块,因为引脚的排列方式不同。
建造
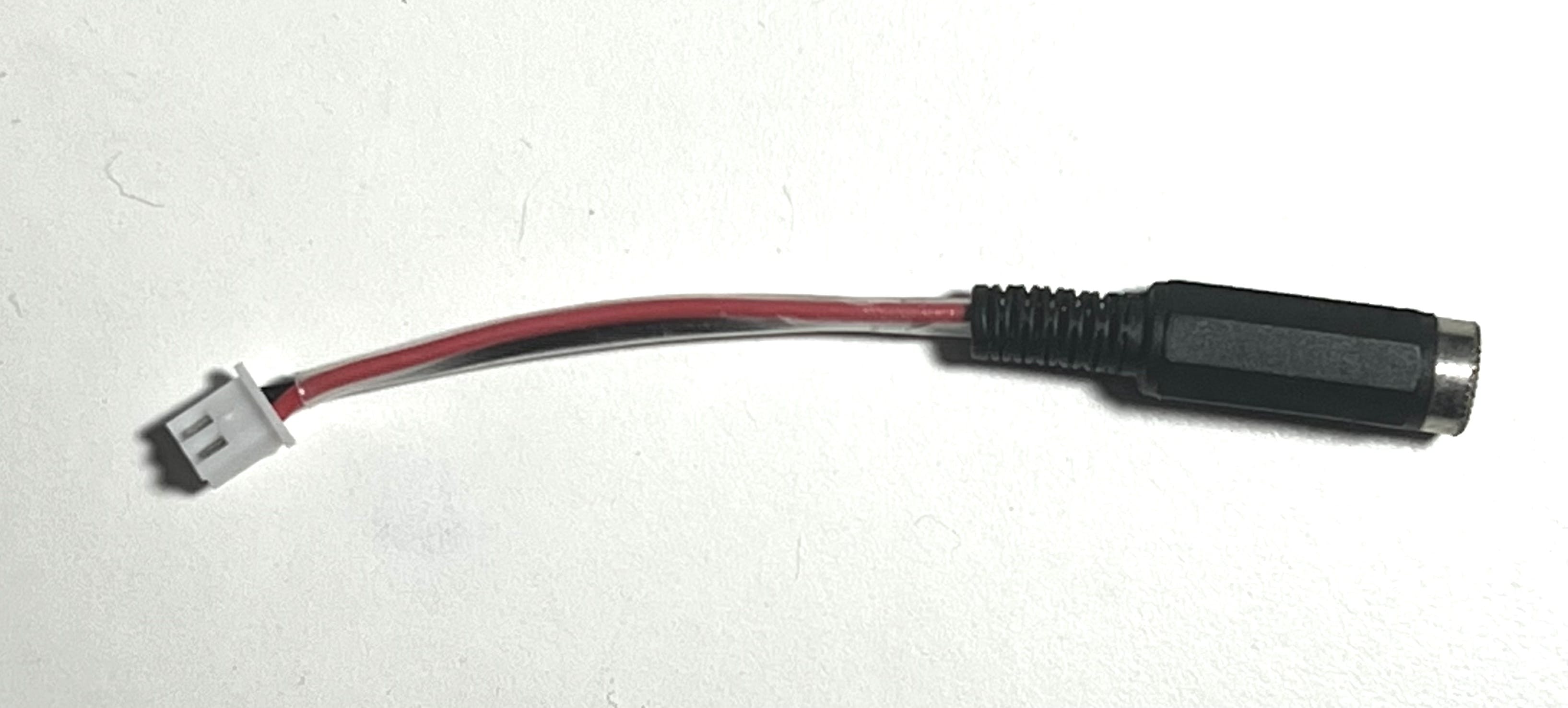
PCA9685 通常配有螺丝门电源端子,用于连接外部电源。我选择将其换成直角安装 JST XH 连接器。我承认这有点混乱,因为引脚对齐不完全匹配,JST 连接器上的腿必须张开一点。如果连接器不是直角类型,那么这种不当处理会使引脚错位。然后我手工制作了一个短电源适配器引线(见照片),以使原来的 Braccio 壁式插头电源仍可用于为伺服系统供电。
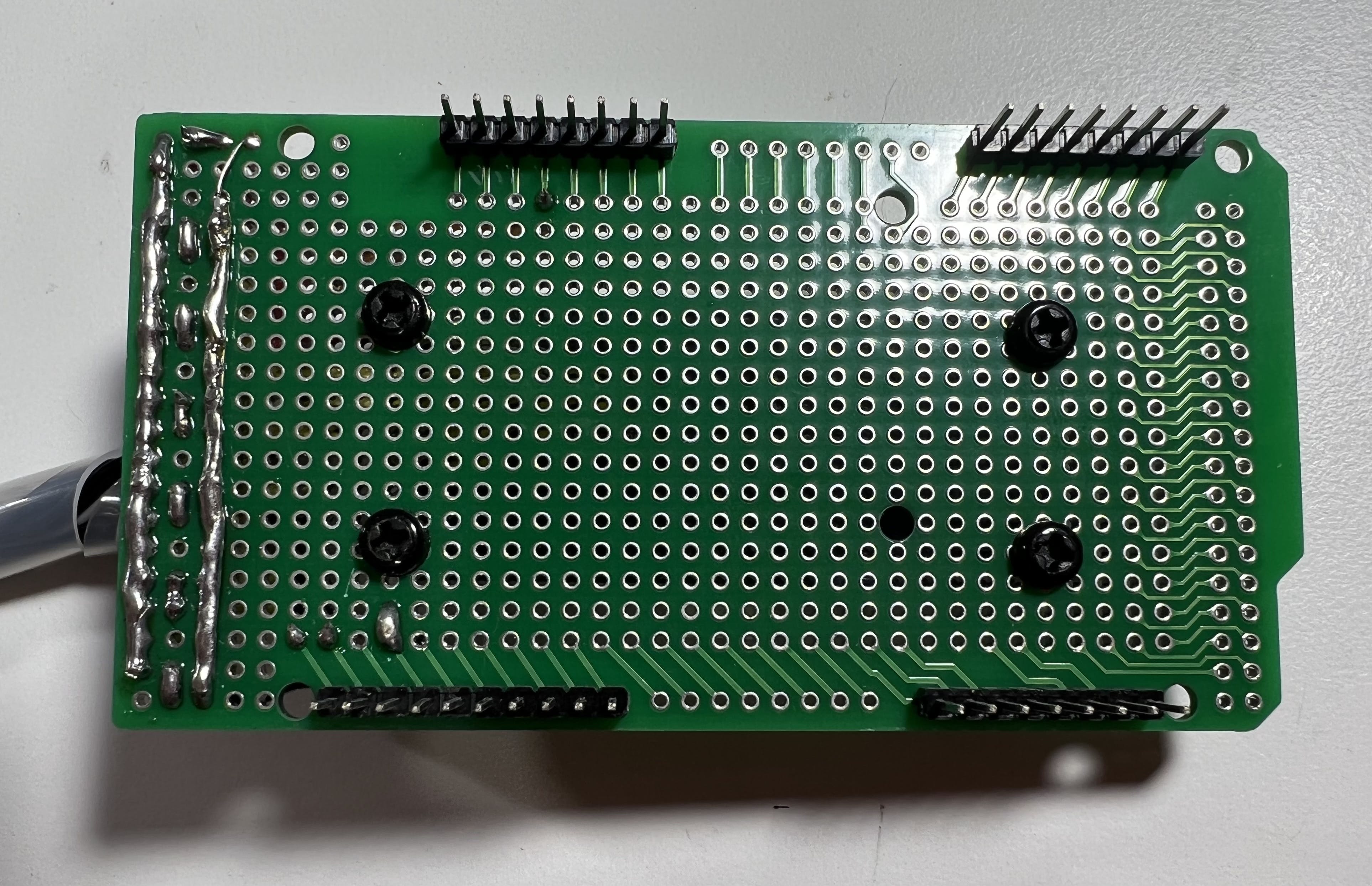
信号连接焊接到 PCA9685 上的引脚 1 到 6,以将引脚编号与 Braccio 伺服编号方案对齐。
您可能会在下面的照片中注意到,仅连接了相对较少的插头引脚,以使屏蔽罩易于安装和拆卸。由于屏蔽层的高度,我没有使用可堆叠的接头,但事后看来,这对于以后访问其他 arduino 引脚很有用(例如,如果您要添加其他传感器)。
Molex KK 连接器的 V+ 和 GND 连接被焊接为轨道。每个 PWM 信号焊接到每个连接器的中间引脚。
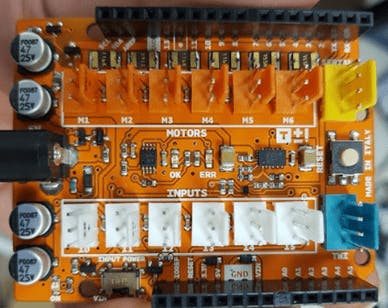
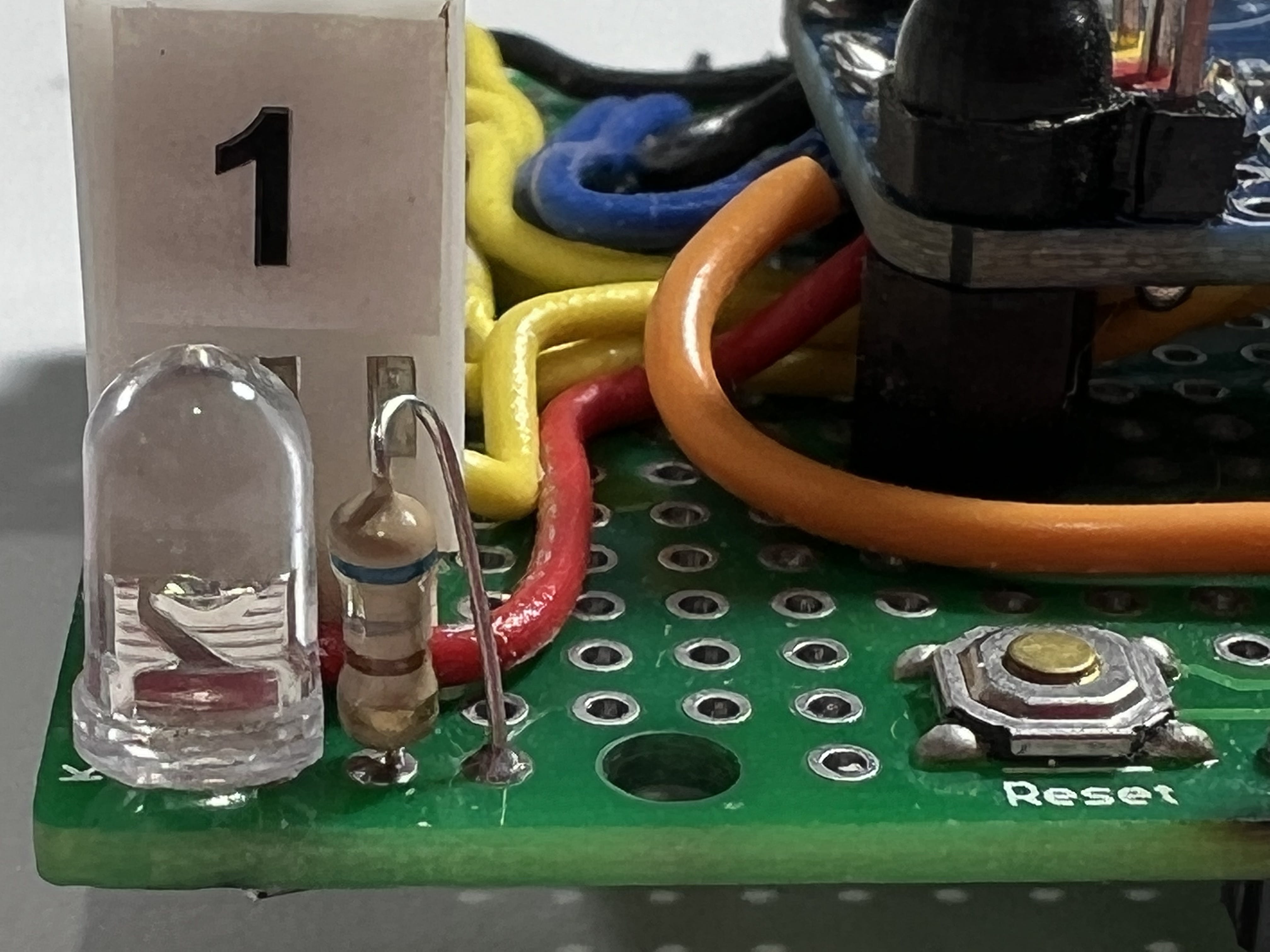
在下面的照片中,您可能会注意到图片左上角有一些无法解释的额外焊接连接。这是我稍后添加的 LED 电机电源指示灯和随附的电阻器。见下面的特写。
反射
当我将接线直接焊接到 PCA9685 上的引脚 1 到 6 时,我没有焊接这些端口上的引脚接头。事后看来,排针对于连接测试设备(例如,万用表和示波器)很有用。
当我开始构建另一个机械臂时,我重用了这种设计方法。新臂使用传统的爱好者伺服连接,可以直接连接到 PCA9685 排针,无需 Molex-KK 连接器。原型屏蔽上提供的额外空间对于断开传感器连接器和其他东西很有用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





