
资料下载


如何编程Otto DIY机器人以使其行走
王静
分享资料个
描述
在本教程中,我们将学习如何轻松编程 Otto DIY 机器人以使其行走。
。
第 1 步:您需要什么
- Otto Robot,您可以在此处购买或在此处查看有关如何通过几个步骤构建它的说明。
- Visuino 程序:下载 Visuino
第 2 步:启动 Visuino,并选择 Arduino UNO Board Type

要开始对 Arduino 进行编程,您需要从此处安装 Arduino IDE:https ://www.arduino.cc/ 。
请注意,Arduino IDE 1.6.6 中存在一些严重错误。确保您安装的是 1.6.7 或更高版本,否则本教程将无法运行!如果您还没有按照本教程中的步骤设置 Arduino IDE 来对 Arduino Nano 进行编程!Visuino:https ://www.visuino.eu也需要安装。启动Visuino,如第一张图所示点击Visuino中Arduino组件(图1)上的“工具”按钮出现对话框时,选择“Arduino UNO”,如图2所示
第 3 步:在 Visuino 中添加组件
添加组件:
- 添加 2X“模拟值”组件
- 添加 2X“除以模拟值”组件
- 添加2X“正弦模拟发生器”组件
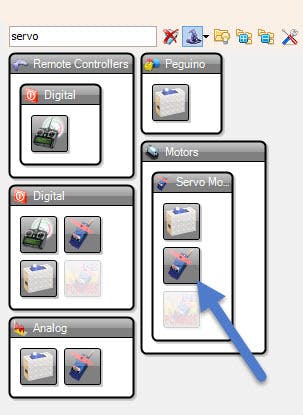
- 添加2X“伺服”组件
第 4 步:在 Visuino 设置组件中
- 选择“AnalogValue1”组件并在属性窗口中将“Value”设置为 20
- 选择“AnalogValue2”组件并在属性窗口中将“Value”设置为 20
- 选择“DivideByValue1”组件并在属性窗口中将“Value”设置为 180
- 选择“DivideByValue2”组件并在属性窗口中将“Value”设置为 180
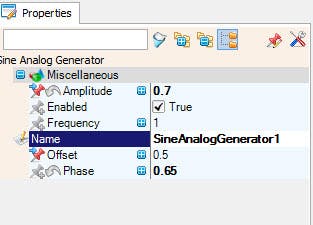
- 选择“SineAnalogGenerator1”组件并在属性窗口中将“相位”设置为 0.65,将“频率”设置为 1,将“偏移”设置为 0.5
- 选择“SineAnalogGenerator2”组件并在属性窗口中将“相位”设置为 0.5,将“频率”设置为 1,将“偏移”设置为 0.5
- 选择“Servo1”并将名称设置为“LR1”<<我们设置这个是为了便于理解。这意味着右腿
- 选择“Servo2”并将名称设置为“FR1”<<这意味着右脚
- 选择“Servo3”并将名称设置为“LL1”<<这意味着左腿
- 选择“Servo4”并将名称设置为“FL1”<<这意味着Foot Left
第 5 步:在 Visuino Connect 组件中
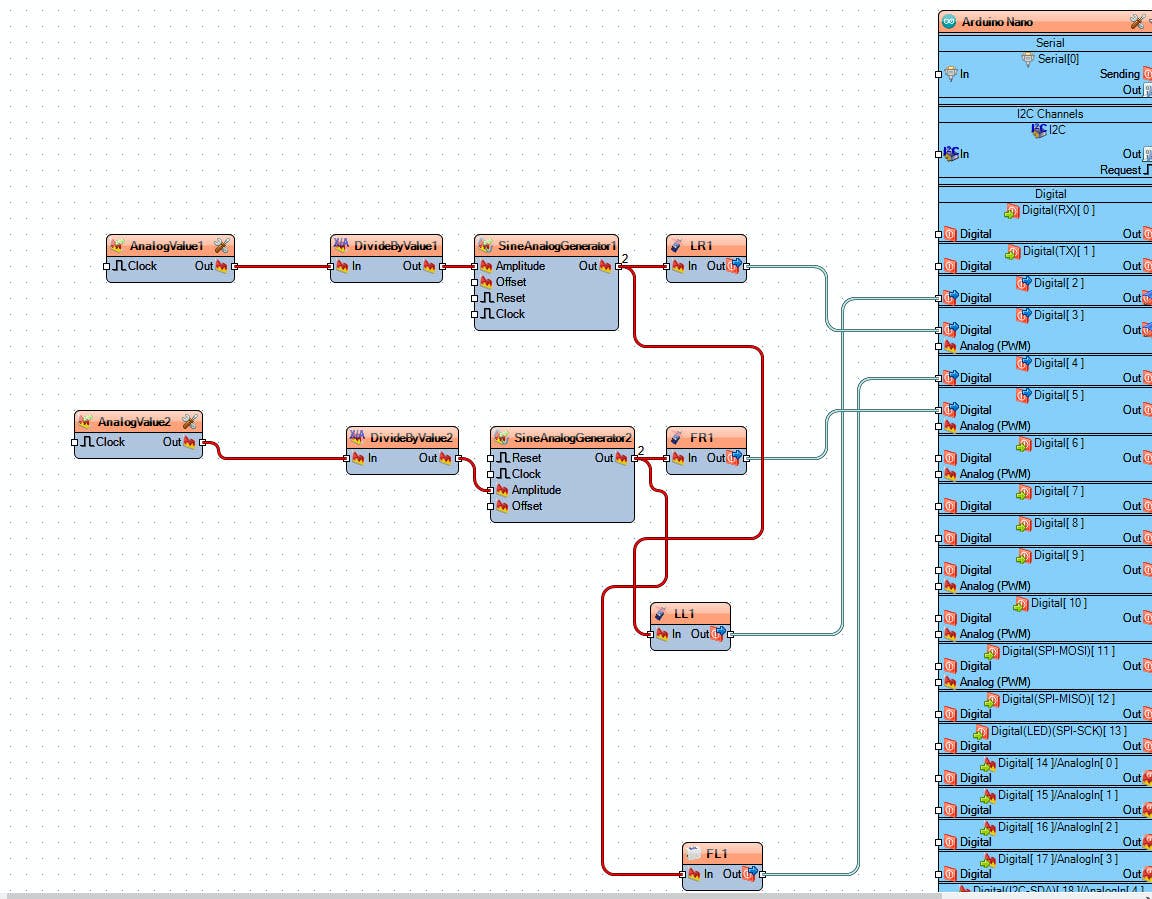
- 将“AnalogValue1”组件引脚 [Out] 连接到“DivideByValue1”组件引脚 [In]
- 将“AnalogValue2”组件引脚 [Out] 连接到“DivideByValue2”组件引脚 [In]
- 将“DivideByValue1”组件引脚 [Out] 连接到“SineAnalogGenerator1”引脚[Amplitude]
- 将“DivideByValue2”组件引脚 [Out] 连接到“SineAnalogGenerator2”引脚[Amplitude]
- 将“SineAnalogGenerator1”引脚[Out]连接到“LR1”组件引脚[In]和“LL1”组件引脚[In]
- 将“SineAnalogGenerator2”引脚[Out]连接到“FR1”组件引脚[In]和“FL1”组件引脚[In]
- 将“LR1”组件引脚 [Out] 连接到 Arduino 数字引脚 [3]
- 将“FR1”组件引脚 [Out] 连接到 Arduino 数字引脚 [5]
- 将“LL1”组件引脚 [Out] 连接到 Arduino 数字引脚 [2]
- 将“FL1”组件引脚 [Out] 连接到 Arduino 数字引脚 [4]
注意:请检查 Arduino 引脚 [2,3,4,5] 是否与伺服电机护罩(腿和脚)上的连接相匹配,并在必要时进行更改。
第 6 步:生成、编译和上传 Arduino 代码
在 Visuino 中,按 F9 或单击图 1 所示的按钮生成 Arduino 代码,然后打开 Arduino IDE
在 Arduino IDE 中:
- 点击菜单“工具”并选择板“Arduino Nano”(图2)
- 单击菜单“工具”并选择端口
- 单击菜单“工具”并选择端口
- 点击 Upload 按钮,编译并上传代码(图 3)注意:如果您在上传代码时发现一些问题,您可以点击 Menu Tools>Processor:..>ATMega328P (Old Bootloader)
第 7 步:播放
如果你给奥托机器人供电,它就会开始行走。
恭喜!您已经使用 Visuino 完成了 Otto 项目。还附上了我为本教程创建的 Visuino 项目,您可以在此处下载。您可以在 Visuino 中下载并打开它:https ://www.visuino.eu
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




