
资料下载


×
自主导航机器人的创建
消耗积分:0 |
格式:zip |
大小:0.00 MB |
2023-06-27
李娓仑
分享资料个
描述
该项目旨在使用德州仪器机器人系统学习套件(Max 版)创建一个自主导航机器人。该项目是由德州仪器大学 (TI University) 进行的暑期学习项目,由 Mark Easley 指导。
机器人执行基本的导航任务。机器人的任务是沿直线路径行进一定距离。但是,如果机器人在其路径上遇到障碍物,它应该执行机动,远离障碍物并最终创建一条新路径以到达预定义的目的地。
下图为机器人的基本工作机构
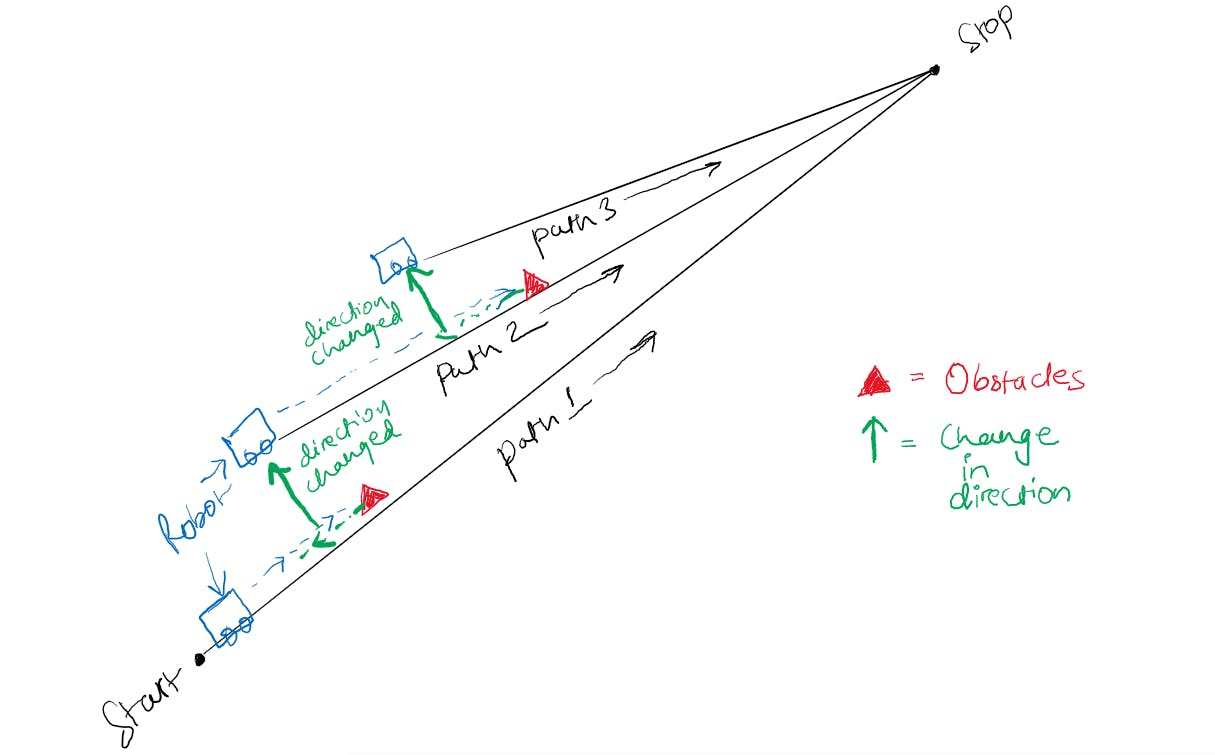
图1:机器人的基本工作机制。
。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





