
资料下载


舞蹈机器人的详细制作流程讲解
分享资料个
随着现代科技的发展,机器人技术已广泛应用于人类社会生活的各个领域,特别是机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。本课题要求设计一具有简单人体功能的、模拟舞蹈动作的类人型机器人,完成简单人的基本动作:可以前进后退,左右侧行,左右转弯和前后摆动手臂,行走频率为每秒两步,举手投足、转圈、头部动作灵活、并具备的语音功能。通过语音识别技术,可以对小机器人进行语音控制,通过发出语音命令,控制机器人的。机器人包括底座、头部、上身、下肢、以及电路控制板,分别控制手臂、头部和底盘运动的电机及传动机构等。通过电路控制和机械传动,可使机器人动作。知识范围涉及机构学、力学、电子学、自动控制、计算机、人工智能等。
具体赋予任务:
1、深入了解类人型机器人的功能及工作要求,查找与课题有关的文献资料及参考书目;
2、学习掌握机构创新设计的基本知识和设计方法,了解控制对象舞蹈机器人的工作原理、动作过程,进行简单舞蹈动作及相应机构设计;
3、根据机器人构成、工作原理、主要特点和技术指标,分析比较,加以论证,确定机器人运动控制最终方案,完成硬件电路设计,单片机控制程序设计;
4、制作舞蹈机器人模型,完成各种运动、动作模拟,调试成功。
5、规定的翻译、论文工作。
2.2 舞蹈机器人设计的数据和要求
1、机器人身高80~120 ㎝,表演时机器人随音乐翩翩起舞,动作协调、灵活;
2、表演各种的基本动作,具体动作可自行设计。涵盖行进、转圈、举手投足、
头部等动作;
3、整套动作持续4 分钟左右;
4、机器人结构紧凑、体积小,重量轻;
5、灵活的多功能机器手臂:活动空间大,可360 度旋转。
6、采用电机驱动,运动准确可靠
3 方案设计及方案论证
3.1 设计制作与调试流程
设计就是根据题目的要求而对硬件和软件进行规划,并选择最合适的硬件电路和软件程序来达到目的。硬件设计是通过对设计要求的分析,对各种元器件的了解,而得出分立元件与集成块的某些连接方法,以达到设计的功能要求。并且把这些元器件焊接在一块电路板上。它包括对各种元器件的功能和接法的了解,以及对各种元器件的选择和设计方案的选择。软件设计是分析设计的硬件用程序实现其功能,并且调试优化产品功能。机器人的设计首先需作总体方案设计,包括机械和电气两部分。根据机械基础知识,从整体上来讲,机械结构设计必须与机器人所要完成的功能相适应。机械部分设计主要包括底盘设计、尺寸选择、驱动方式设计、电机选择等;电气是机器人最重要的部分,直接影响着机器人功能的实现于否。舞蹈机器人要求完全自动控制,必须采用单片机为
控制核心,它类似于机器人的大脑,接收和处理所有外界信息,指挥并控制机器人的所有动作。语音识别等功能是制作机器人硬件的难点,它要求机器人具有一定的感觉系统。目前,机器人技术已日趋成熟,机器人感觉系统可通过各种各样相应的传感器技术即可实现。传感器把接收到的外部信息输入到单片机,再通过软件进行控制,从而单片机发出命令指挥机器人动作。软件编程可以丰富机器人的功能,使机器人动作更加完善。总体方案设计框图如图3.1 所示。
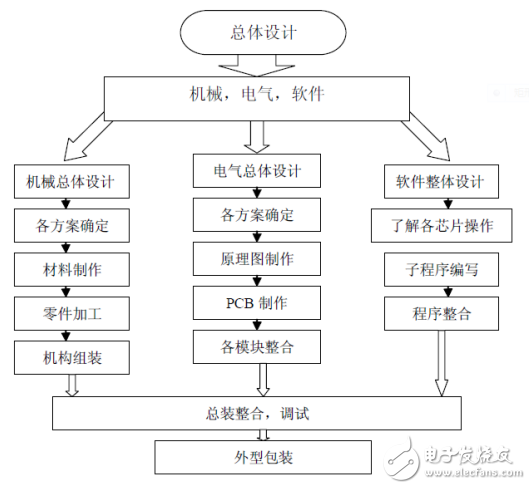
图3.1 机器人总体制作过程
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







