
资料下载


×
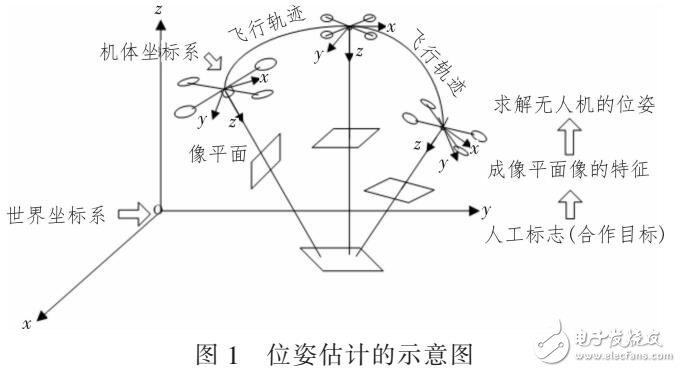
一种数字图像处理结合2D-3D场景重建的位资估计算法
消耗积分:1 |
格式:rar |
大小:2.15 MB |
2017-11-02
分享资料个
无人机凭借结构稳定、可操作性高、无人驾驶等特点,在航拍勘测、目标定位跟踪等领域获得了广泛应用。在利用无人机对地面/海上等目标的定位与跟踪、无人机白身位姿控制、无人机测量、无人机自主降落等问题中,无人机白身位姿的确定,成为研究的前提,是不可同避的一大难题。
目前,无人机白身的位姿信息主要依靠CPS和IMU获取。CPS受环境与气候的干扰严重,尤其在室内,无人机无法接收到GPS信号,因此无法获取白身的位置信息。而IMU是根据加速度计和陀螺仪的姿态变化积分获取位姿信息的。实际应用中会产生累积误差从而降低位姿估计的精度。随着CCD器材等视觉传感器的制作丁艺日趋精良,利用视觉传感器获取的信息进行位姿估计成为一种有利的替代手段。
基于视觉的无人机位姿估计,减少了携带的设备且价格低;同时,视觉信号稳定,鲁棒性强,不存在累积误差。利用视觉信息实现无人机的位姿估计,无疑是实现无人机白主位姿估计的又一有力技术手段,尤其是在室内无法获取CPS信号的区域。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



