
资料下载


×
双极步进马达加速和减速过程应用介绍
消耗积分:0 |
格式:rar |
大小:0.3 MB |
2017-12-06
分享资料个
本文中,我们假设读者已熟悉如何利用市场上已有集成微步进驱动器,对步进马达进行控制。步进驱动器(例如Tl DRV8818等)的输出与方波(“步进输入”)频率成正比。每个“步进”脉冲均等于驱动器步进逻辑定义步进(即微步进)。因此,改变方波频率,也会相应改变步进马达的速率。
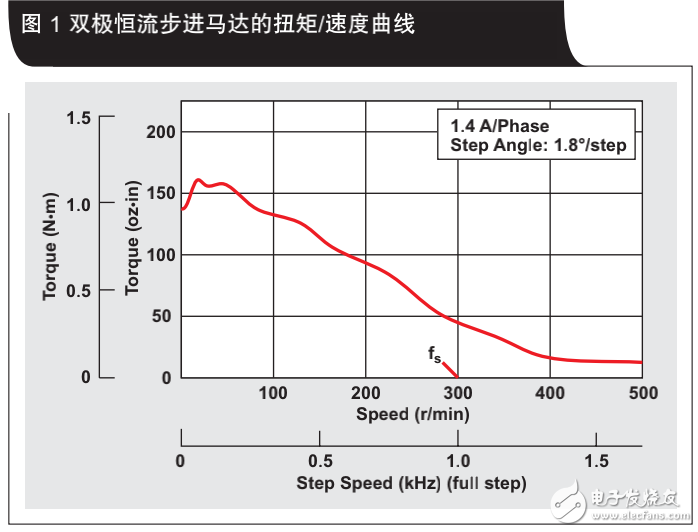
图1显示了某个马达制造厂商的传统步进速率/扭矩曲线图,其中起始频率f。为一个重要参数。我们必须知道,要想正常启动这种特殊的马达,必须使用一个小于f。的步进速率。使用大于f。的步进速率启动马达,可能会使马达停转,并失去同步性。一旦出现这种情况,马达转动控制将受到严重的影响。表面看起来,这是一个严重的问题,但实际却很容易解决。您需要做的只是让马达以某个低于f。的步进速率启动,然后提高速度,直到达到目标速度为止。遵循这一原则以后,步进马达便可以通过远超f。的步进速率来驱动一只要速度保持在所示扭矩/速度曲线以下。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





