
资料下载


×
步进电机驱动算法之梯形加减速算法
消耗积分:2 |
格式:pdf |
大小:0.73 MB |
2023-03-17
杜云
分享资料个
电机的控制方式一般分为开环控制与闭环控制两种控制方式,其中开环控制原理框图如下:
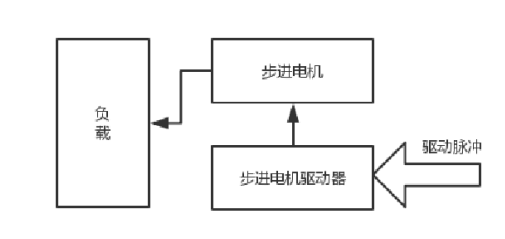
这种种控制方式的特点是:控制简单、实现容易、价格较低,这种开环控制方式,负载位置对控制电路没有反馈。 对于步进电机,控制脉冲的输入并不依赖于转子的位置,而是按一固定的规律发出控制脉冲,如果励磁变化太快,电机不能移动到新的位置,那么实际 负载位置与理想位置就会产生一个偏差,就有可能出现失步或者过冲现象,所以需要使用加减速算法。 梯形加减速算法,S加减速算法等就是步进电机开环控制的应用。 使用步进电机驱动器驱动步进电机。当脉冲提供给驱动器时,在过于短的时间里,控制系统发出的脉冲数太多,也就是脉冲频率过高,将导致步进电机 堵转。要解决这个问题,一般采用加减速的办法。 就是说,在步进电机起步时,要给逐渐升高的脉冲频率,减速时的脉冲频率需要逐渐降低。 加速过程,是由基础频率(低于步进电机的直接启动的最高频率)与跳变频率(逐渐加快的频率)组成加速曲线(降速过程反之)。跳变频率是指步进 电机在基础频率上逐渐提高的频率,此频率不能太大,否则会产生堵转和丢步。 加减速曲线一般为直线(梯形)、指数或者S型曲线等。
这种种控制方式的特点是:控制简单、实现容易、价格较低,这种开环控制方式,负载位置对控制电路没有反馈。 对于步进电机,控制脉冲的输入并不依赖于转子的位置,而是按一固定的规律发出控制脉冲,如果励磁变化太快,电机不能移动到新的位置,那么实际 负载位置与理想位置就会产生一个偏差,就有可能出现失步或者过冲现象,所以需要使用加减速算法。 梯形加减速算法,S加减速算法等就是步进电机开环控制的应用。 使用步进电机驱动器驱动步进电机。当脉冲提供给驱动器时,在过于短的时间里,控制系统发出的脉冲数太多,也就是脉冲频率过高,将导致步进电机 堵转。要解决这个问题,一般采用加减速的办法。 就是说,在步进电机起步时,要给逐渐升高的脉冲频率,减速时的脉冲频率需要逐渐降低。 加速过程,是由基础频率(低于步进电机的直接启动的最高频率)与跳变频率(逐渐加快的频率)组成加速曲线(降速过程反之)。跳变频率是指步进 电机在基础频率上逐渐提高的频率,此频率不能太大,否则会产生堵转和丢步。 加减速曲线一般为直线(梯形)、指数或者S型曲线等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





