
资料下载


×
双边滤波点云去噪算法
消耗积分:2 |
格式:rar |
大小:0.98 MB |
2018-01-05
分享资料个
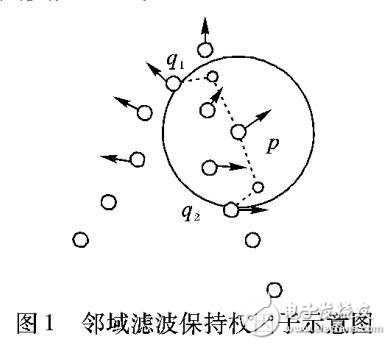
针对三维点云数据模型在去噪光顺中存在不同尺度噪声的问题,提出一种基于噪声分类的双边滤波点云去噪算法。该算法首先将噪声细分为大尺度和小尺度噪声,并使用统计滤波结合半径滤波对大尺度噪声进行去除;然后对三维点云数据进行曲率估计,并对现有点云双边滤波进行改进,增强其鲁棒性和保特征性;最后使用改进的双边滤波对小尺度噪声进行光顺,实现三维点云数据模型的去噪、光顺。与单独使用双边滤波、Fleishman双边滤波相比,改进算法在三维点云数据模型光顺平均误差指标上分别降低了50. 53%和21. 67 %。实验结果表明,该改进算法对噪声进行尺度的细分既提高了计算效率,又避免了过光顺和细节失真,较好地保持模型中的几何特征。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 jf_48812261
2023-09-27
0 回复 举报太强了,感觉就是我需要的资料,楼主实力太强了 收起回复
jf_48812261
2023-09-27
0 回复 举报太强了,感觉就是我需要的资料,楼主实力太强了 收起回复
- 相关下载
- 相关文章


下载排行榜
- 暂无相关数据

