
资料下载


×
基于PMPSD的工业机器人几何参数标定方法
消耗积分:3 |
格式:rar |
大小:2.51 MB |
2018-01-17
分享资料个
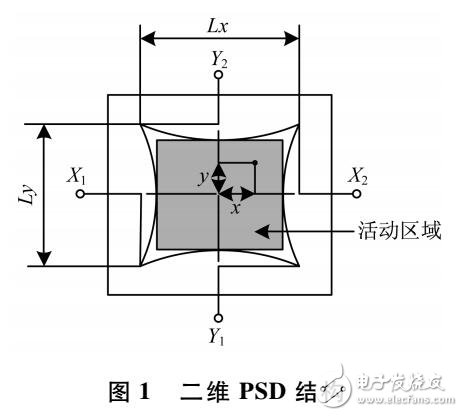
针对由几何参数不精确引起工业机器人绝对定位精度低的问题,提出一种基于位姿修正位置敏感探测器的几何参数标定方法。通过建立误差运动学模型,使用位置敏感探测器( PSD)装置进行数据采样,利用位姿修正原理对末端激光器位姿和关节转角进行修正,构建模型约束目标函数,运用LM算法计算得到几何参数误差,修正几何参数名义值。实验结果表明,该方法避免了PSD反馈控制,能够快速实现工业机器人几何参数标定,定位平均误差和标准差分别为78. 28%、76. 38%,有效提高了机器人的定位精度。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



