
资料下载


Stewart机器人传感与控制系统建模
分享资料个
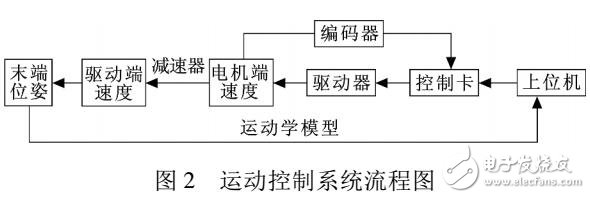
随着国内外传感与控制技术的不断突破与发展,机器人尤其是并联机器人在各个交叉领域的应用越来越广泛。并且加之柔性自动化装配具有的数字化、自动化、集成化等特点,因此面向柔性自动化装配的各类机器人能够提高生产率和灵活度,且能满足大批量生产活动。所以对面向柔性自动化装配的Stewart机器人的研究很有必要。文中设计的Stewart机器人传感与控制系统,传感系统(下面称力感知系统)能够通过建立合理的力感知系统的数学模型,通过设计合理的力传感器布局,设计合理的数据采集系统方案,实现对轴工件与7L工件接触时空间六维力的测量,从而为装配操作提供力和力矩的反馈数据。控制系统能够根据对机器人动平台的位姿要求,重点在于建立合理的运动学模型,通过上位机发送相应的指令给控制器,再通过驱动器、电机对每一根关节进行单独控制,从而实现对机器人动平台的运动控制要求。
所述Stewart并联机器人系统主要由三部分组成:一是力感知系统;二是运动控制系统;三是六自由度并联机器人机械本体,它包括动平台、静平台、夹持器,动平台由丝杆螺母驱动,丝杆螺母通过虎克铰与动静平台连接。对于力感知系统,其末端执行器在夹持工件进行孔和轴的装配时,会受到力和力矩,故需要力传感器进行空间六维力的测量,然后通过数据采集系统将传感器受到的力反映到上位机,接着要根据传感器端受力与工件端所受力和力矩的数学模型,反求出工件所受的力和力矩。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






