
资料下载


×
集群移动机器人定位系统设计
消耗积分:3 |
格式:rar |
大小:1.18 MB |
2018-01-23
分享资料个
集群是大自然中群体生物常见的生活方式,自然界中的生物多以群体生活,如大雁的迁徙、鱼群的觅食、蚁群的群居生活等。通过模拟这些行为,揭示在群体行为中蕴含的科学知识,将其中的技术应用在人类的生活实践中,能够推动仿生学的发展。群体里的每个机器人可以根据需要自主控制自己的行动,但还是要通过合作弥补个体智能的不同,从而使群体更加智能,这些都为一些大型且复杂任务的选择提供了更好的帮助。现在也有很多的例子可以说明群体机器人的广泛使用,例如美国DARPA公司开展的Smart Dust项目,运用MEMS技术做成了移动机器人,然后建成感知网络的方式,就是运用群体合作来进行的。还有美国MIT AI实验室微型多移动机器人系统Ants也是运用了集群这种方式。
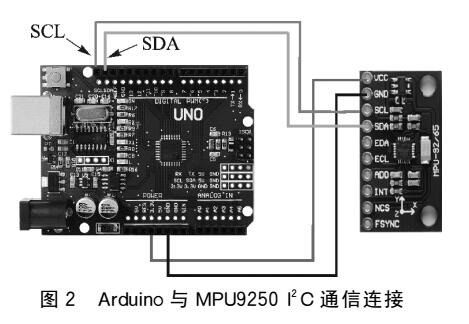
本文重点论述了集群移动机器人中的定位问题,旨在解决机器人之间的相互定位难题,主要采用ZigBee技术与MPU9250传感器相结合的解决思路,利用Arduino对MPU9250进行了数据读取,以及通过无线传感器网络实现信息的交互传输。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





