
资料下载


×
一种机械臂末端旋拧工具的设计
消耗积分:3 |
格式:rar |
大小:0.97 MB |
2018-02-28
分享资料个
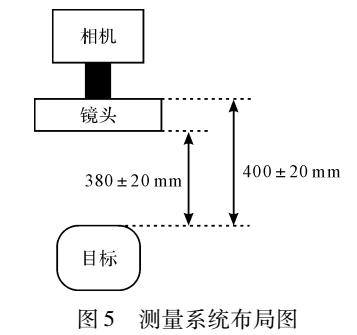
针对航天器在轨精细操作应用需求,对螺钉旋拧T具进行了研究,设计了一种适用于空间机械臂自主旋拧螺钉的末端工具。该工具由机械臂末端关节电机驱动旋转,利用电磁铁对螺钉吸附、夹持和释放,通过复位弹簧的压缩和复位实现了对螺钉的随动而不需在旋拧过程巾改变机械臂的整体位置和姿态,以臂上力矩传感器实时监测了拧紧力矩。提出了基于智能手眼相机识别与测量的柔顺自适应旋拧方法,并在地面仿真模拟操作巾对测量精度和旋拧力矩进行了测试。试验结果表明:所设计的末端旋拧T具机械结构简单,易于操作控制,实现了设计功能,能可靠地对螺钉进行旋拧作业并合理控制拧紧力矩。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





