
资料下载


TMPM370无传感器BLDC马达的矢量控制的应用手册资料免费下载
canny
分享资料个
1 马达控制
马达控制执行流程如图 1所示。
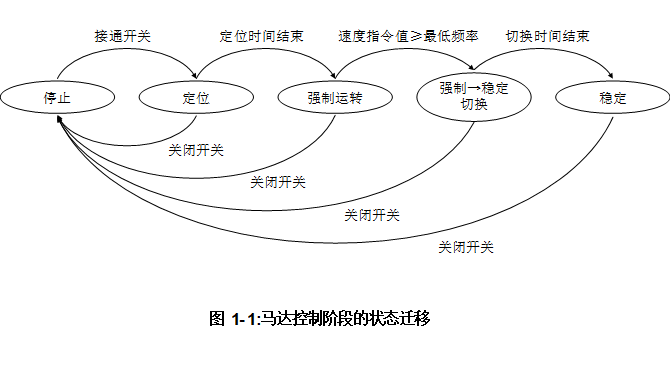
马达控制具有图1所示的5个控制阶段。要启动马达使其稳定运转,需要依次进行各阶段操作。
即停止(Stop)阶段、定位(Initposition、也称作直流励磁)阶段、强制运转(Force)阶段、强制→稳定转换(Change_up)阶段、稳定(Steady_A)阶段。各个阶段的处理,需要实施与该阶段相对应的控制。
停止(Stop)阶段时,马达停止。
定位(Initposition、也称作直流励磁)阶段时,电流流经马达线圈使铁芯处产生磁通量,将转子的位置固定于0点附近。位置确定完成后,进入下一阶段。
强制运转 (Force)阶段时,转子开始旋转。该阶段并非进行矢量控制反馈处理,而是强制地加入旋转磁场、转子追随该旋转磁场进行旋转。角速度指令值达到最低频率时,进入下一阶段。
強制→稳定的切换(Change_up)阶段时,马达进行从强制运转切换至稳定状态的处理。使马达配合转子的位置进行转动(原本马达旋转与转子位置无关)。强制到稳定切换完成后,进入下一阶段。
稳定(Steady_A)阶段时,按照转子位置和马达目标旋转速度进行驱动。
1 矢量控制的原理
无传感器BLDC 马达的矢量控制方框图与各方框处的处理如下。
W经速度控制转换成对Id_ref和 Iq_ref的设定(Id_ref=0,q轴电流每次都在被调节)?

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




