

《AI机器人控制进阶教程(入门版)》阅读指引

具身机器人走得稳不稳?它可以说了算!
如何利用NVIDIA Cosmos Cookbook提升机器人操作能力

兆易创新GD32H7系列MCU适配Micro-ROS的完整技术指南
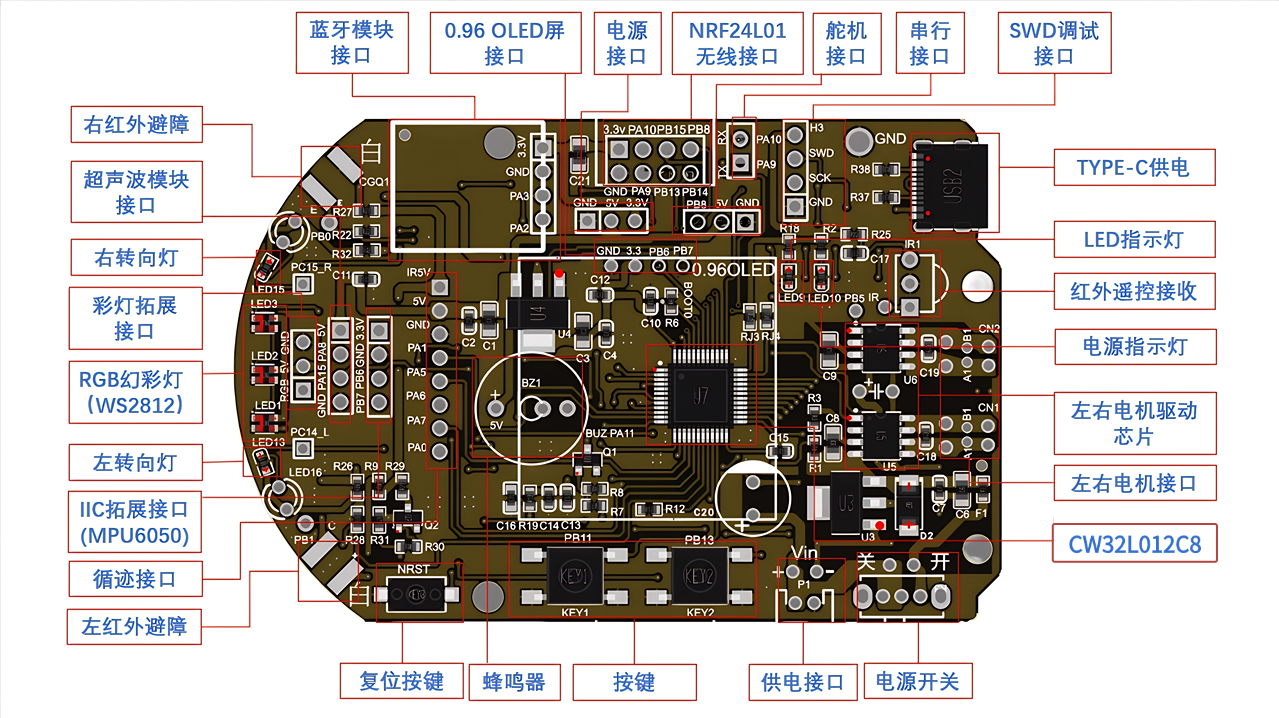
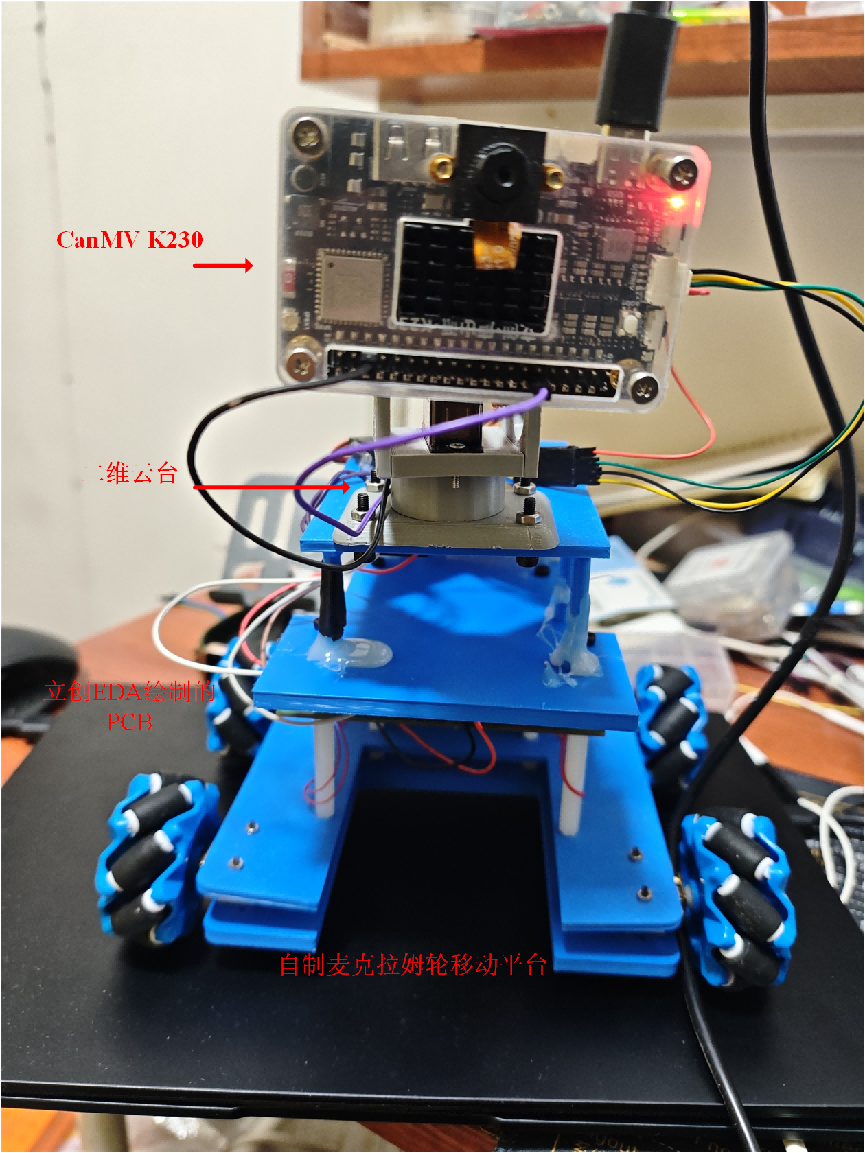
CW32L012“哈基汪”开发套件快速上手指南(附资料)

杰和IB3-771:以RK3588赋能机场巡检机器人

深度解析48V系统如何革新机器人技术
手搓一个RT-Thread工地巡检机器人要几步? | 技术集结
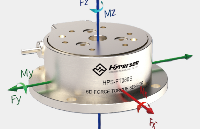
六维力传感器:机器人的“触觉”,选末端还是内置?

如何在NVIDIA Jetson平台上运行最新的开源AI模型
借助NVIDIA Isaac Sim与World Labs Marble加速机器人仿真环境构建
如何在NVIDIA Jetson Thor上提升机器人感知效率
如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?

机器人用霍尔电流传感器,能提升操作安全性么?

【案例分享】电子谷多芯线束赋能高效产线!AGV 搬运机器人稳定连接方案

如何为盘点机器人选配(集成)条码识别模块?

智慧电网 ——DL-RC63室内外一体化智能巡检机器人

EtherCAT主站协议栈EC-Master在ROS(机器人操作系统)中的应用

除草机器人气密性检测仪选购指南

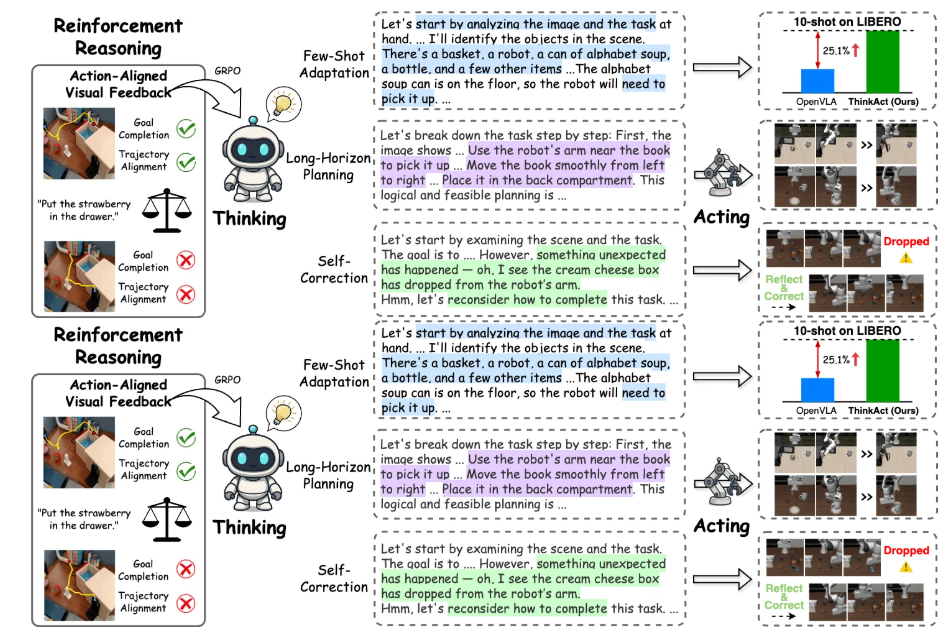
Progress-Think框架赋能机器人首次实现语义进展推理

 下载APP
下载APP
 搜索内容
搜索内容
