
请问KUKA机器人的Mada文件怎么配置呢?

聊聊KUKA机器人高级编程:中断
KUKA机器人:关键的KRL概念-有效作用范围
KUKA机器人KR QUANTEC-2更换机器人手腕的步骤详解

KUKA机器人:Makrostep-Diagnose

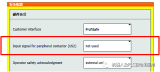
KUKA C4机器人:为宏启用或阻止内联窗体USER

KUKA C4机器人:控制器与机器人之间的数据对比分析
KUKA机器人KSR28VASS06运动参数控制标准

KUKA机器人程序诊断:显示调用方堆栈

基于KUKA C4机器人的控制柜(CCU)设计
KUKA机器人在程序里的ASYPTP用法

浅谈KUKA机器人的X11现场布线

KUKA C 2机器人 InterBUS网络设置
KUKA机器人的”Dry run空转”概念

标准KUKA机器人带抓手V8.5操作步骤
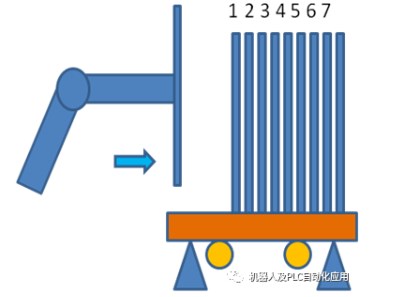
KUKA堆放件控制USER说明
KUKA机器人CONTINUE指令介绍
KUKA机器人US1,US2的始末
EtherCAT网络通讯有哪些特点?
KUKA机器人的算术运算符介绍

 下载APP
下载APP
 搜索内容
搜索内容
