
资料下载


×
基于物联网的安卓手机加速度计控制机器人
消耗积分:0 |
格式:zip |
大小:0.12 MB |
2022-11-21
张华
分享资料个
描述
我们知道设计一个手势控制的机器人需要发射器和接收器部分。要传输和接收数据,我们必须选择蓝牙或射频发射器和接收器。这些类型的设计需要在发射器部分安装一个外部传感器。我决定用不到 35 美元设计一个手势控制机器人。所以我选择了一个安卓手机加速度传感器来控制机器人。在这里,我没有从手机中移除传感器,而是使用Blynk android 应用程序来获取传感器数据并将手势详细信息传输到机器人的接收器端。
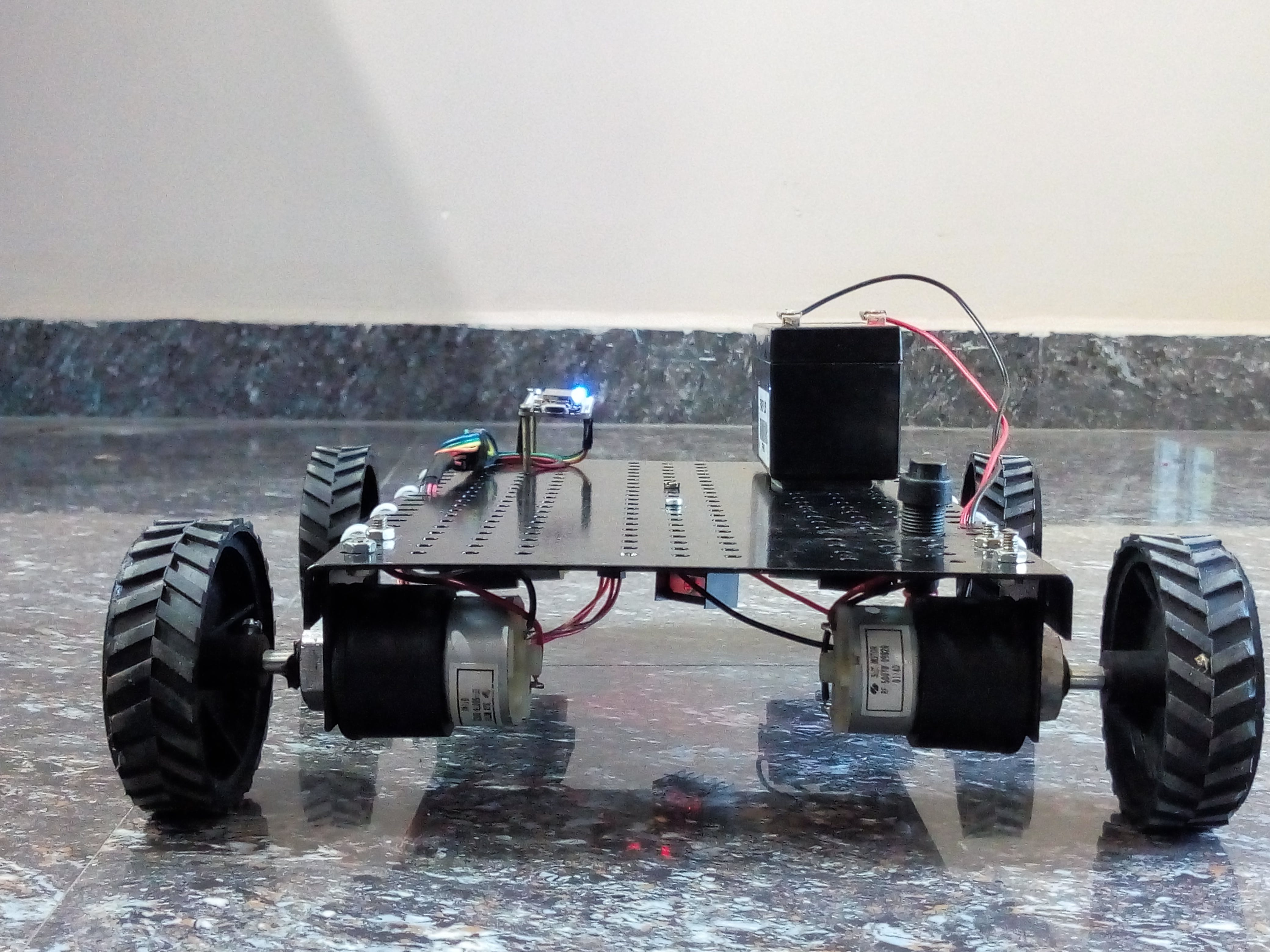
机器人图像
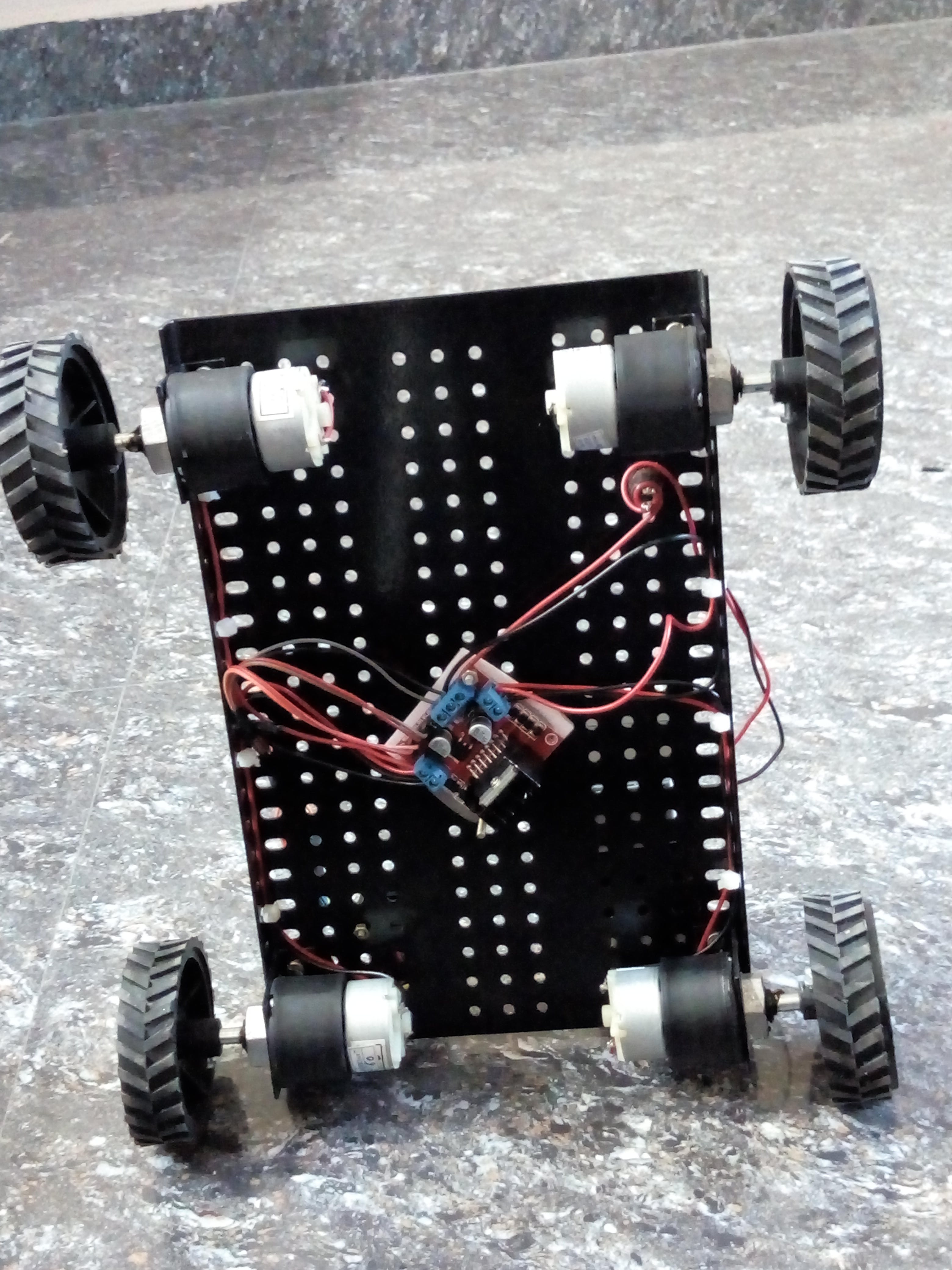
机器人背面
它是如何工作的?
我正在使用安装了 Blynk android 应用程序的 android 手机。控制机器人需要互联网连接。此处的 Android 手机充当控制机器人的发射器部分。NodeMCU 用于接收器部分以接收来自 Blynk 的数据。
NodeMCU 从 Blynk 接收虚拟数据,并将数据与预定义的值进行比较,并据此控制机器人的运动。NodeMCU 没有直接控制直流电机的能力,所以我使用 L298 电机驱动器来控制直流电机。
从 android 接收手势传感器数据很简单,我们只需要从智能手机传感器部分选择加速度计小部件并选择虚拟引脚。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




