
资料下载


使用分组无线电镜像机器人运动
维生素B2
分享资料个
描述
群机器人
让大量机器人协同执行任务的想法并不是什么新鲜事,因为在索契奥运会等活动中,四轴飞行器用 LED 绘制设计,卡车车队一起移动。我想对这个项目做的是探索如何使用廉价的硬件和更远的距离来实现这一点,因为蓝牙在信号变得太弱之前只能达到大约 45m 的距离。
分组无线电工作原理
用于该项目的 Adafruit Feather M0 包含一个板载 RFM69 无线电模块,它可以在两种模式之一下运行。第一个是从一个点到另一个点的连续数据流,就像一对对讲机收音机的功能一样。这可能导致大量数据丢失或损坏,并且在其之上构建应用层更加困难。
操作无线电模块的另一种方式是数据包模式,它收集数据缓冲区并将其以数据包的形式发送,类似于 UDP 协议的工作方式。这样,信息可以被加密并检查错误,使信息传输更加可靠。发送数据包后,接收方会向发送方发送确认信息,表明传输成功。
底盘
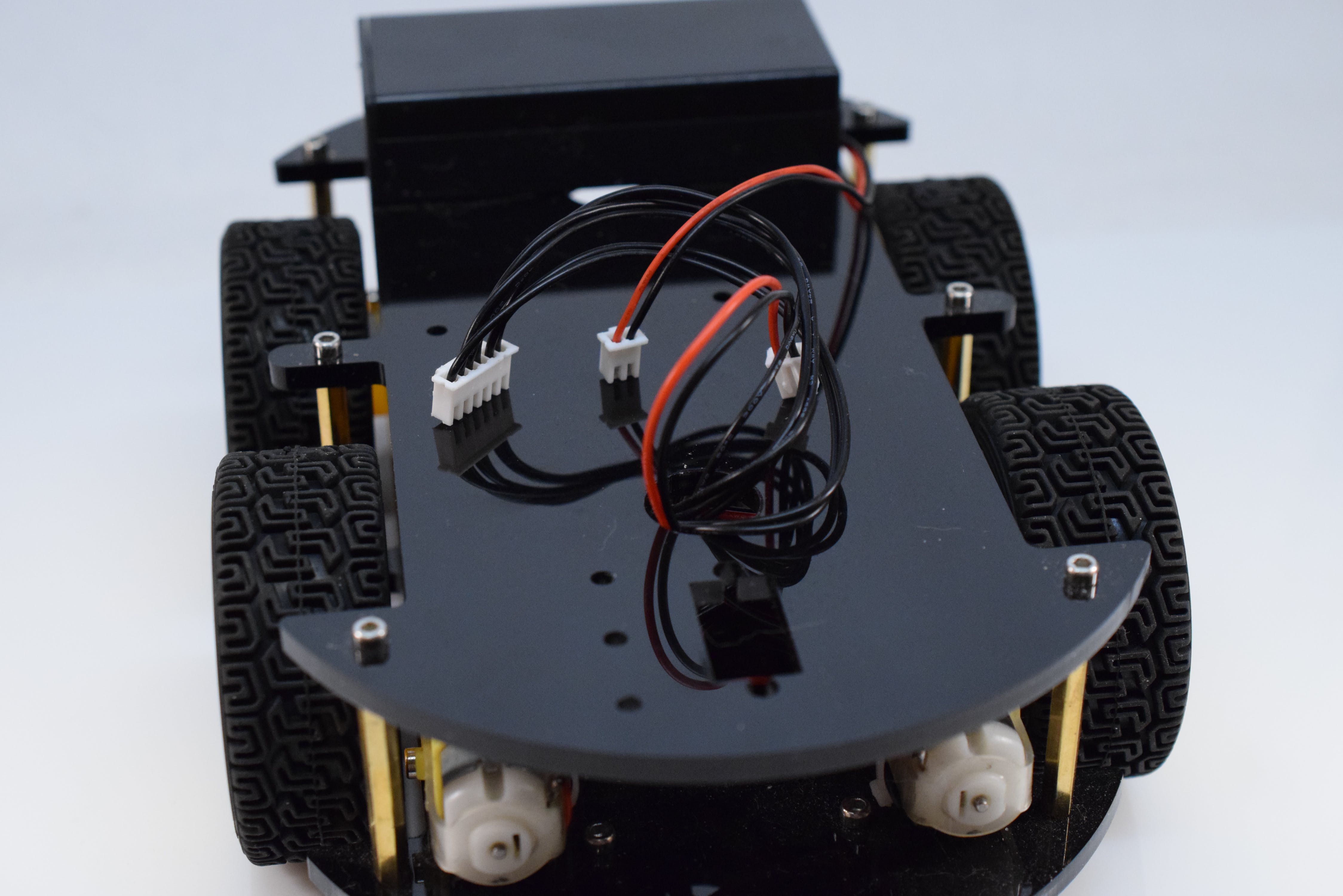
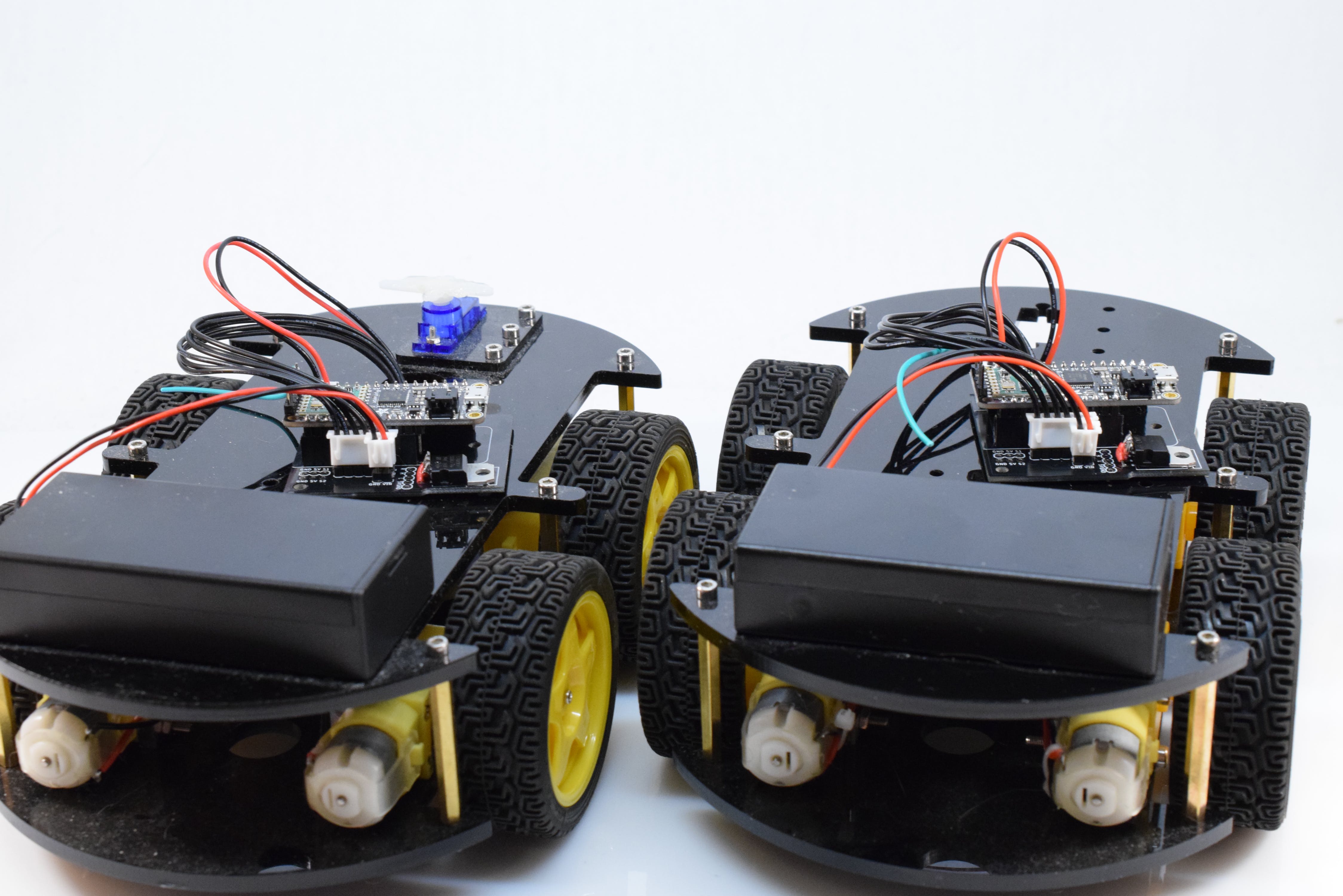
从头开始设计机器人底盘并收集必要的组件需要很长时间,并且可能会变得非常昂贵。相反,使用套件是一种更快、更便宜的选择。我选择了 Elegoo 的Smart Car V3 套件之一,其中包含机器人汽车所需的一切,包括电机、电机控制器、可充电电池和伺服支架。该套件由激光切割的亚克力面板和铣削的铝片坚固地构成。如果您对如何组装它感到好奇,可以在这里查看我的其他项目之一。
硬件和PCB设计
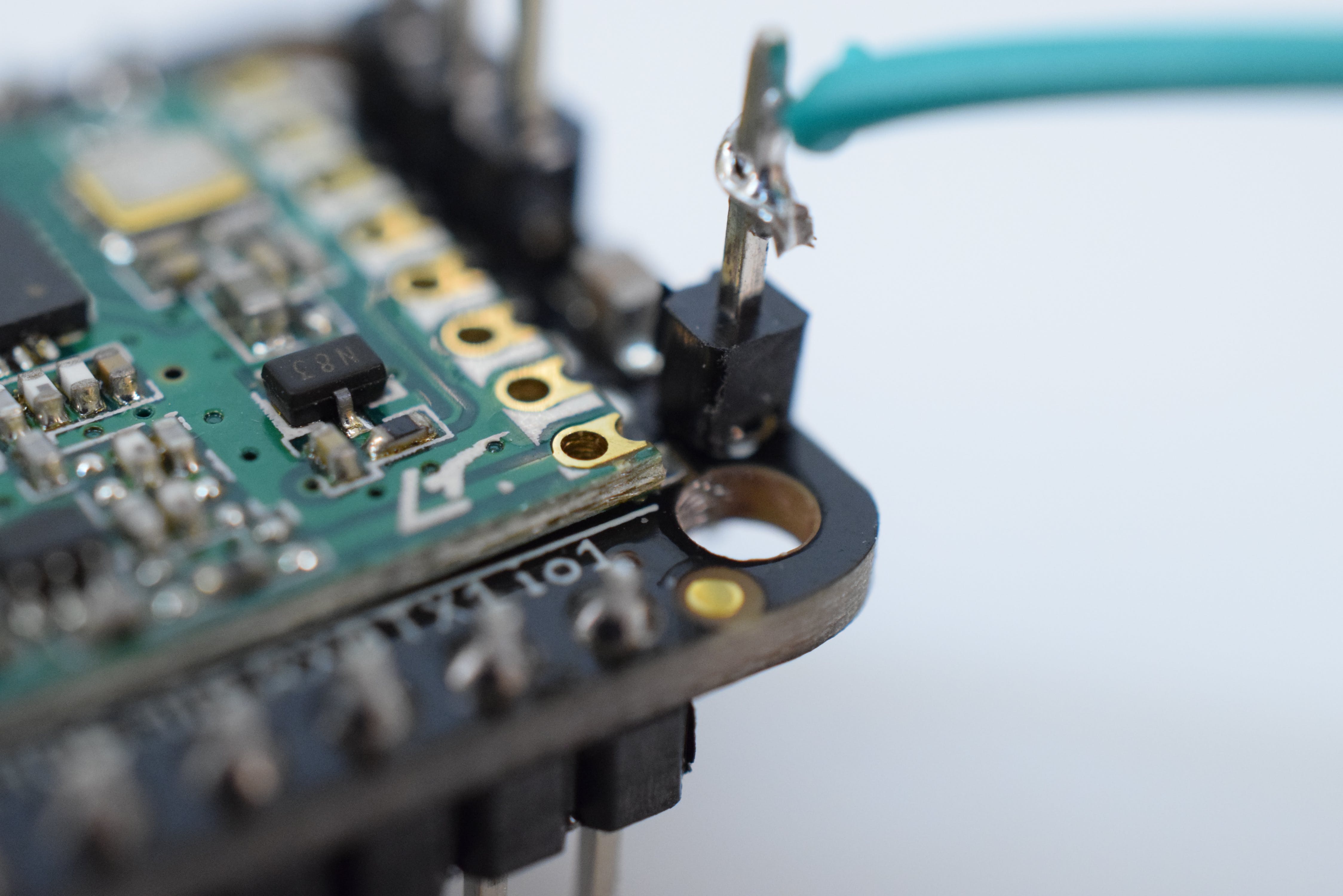
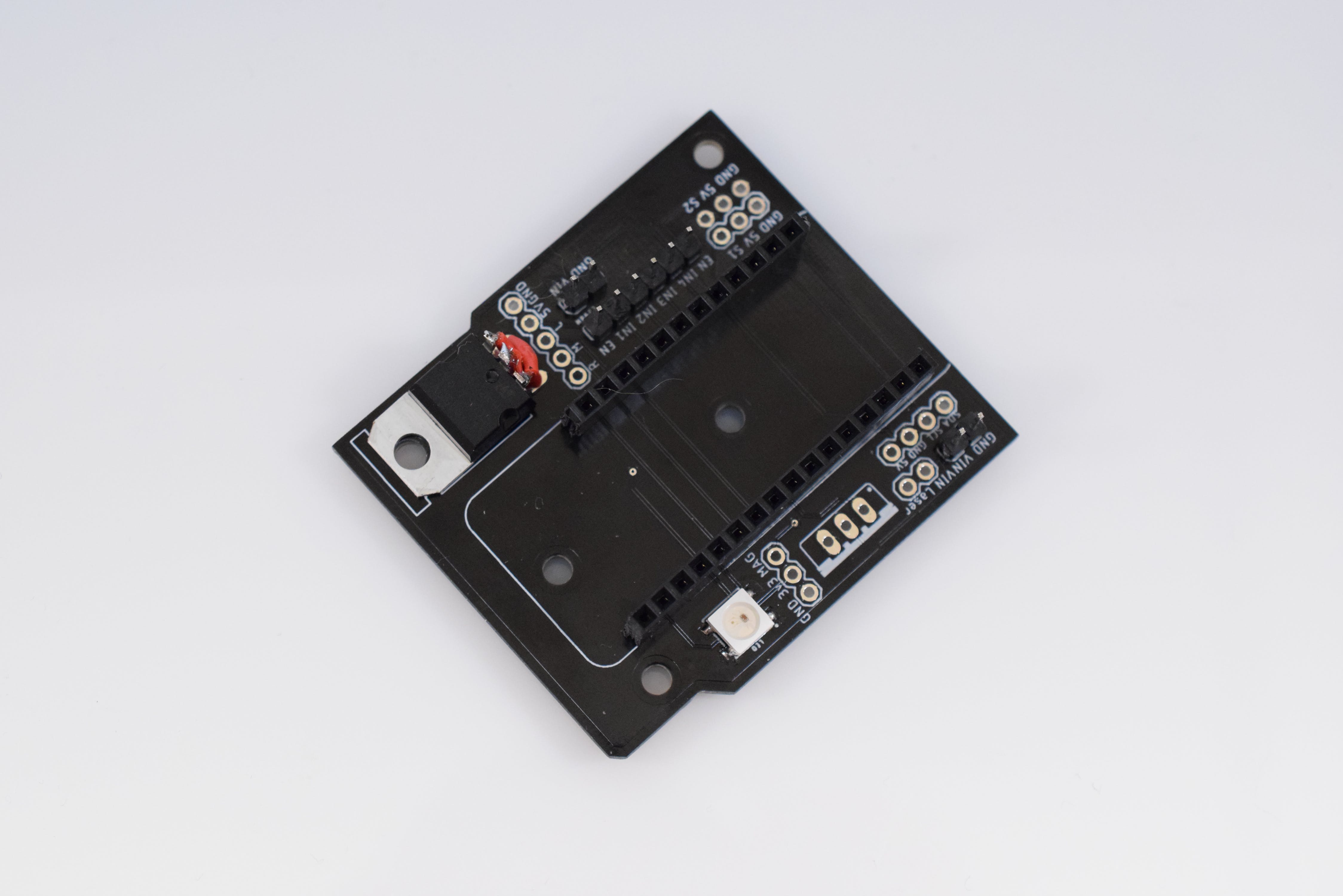
如前所述,该项目使用一对带有 RFM69 分组无线电板的 Adafruit Feather M0。一个设置为发送运动数据,另一个接收它。此外,每个机器人都有四个带变速箱的直流电机、一个定制的 L298N 电机驱动器和一个电池组。我之前的一个项目使用了几块 Particle Xenon 板来控制同一个机器人,这些板也有相同的引脚排列(都是羽毛),所以我能够快速将更多的 PCB 焊接在一起,然后插入分组无线电羽毛。
集会
因为我已经组装了两个机箱,所以我可以跳过那部分,直接将板焊接在一起。首先,我焊接了羽毛和 L298N 的接头,以及两个电源连接器。接下来,我在每个 PCB 上添加了一个 WS2812B LED 以备将来使用。最后,我连接了 5v 稳压器。然后将所有这些放置在底盘上,并用一个 3 毫米机械螺钉固定。

编程
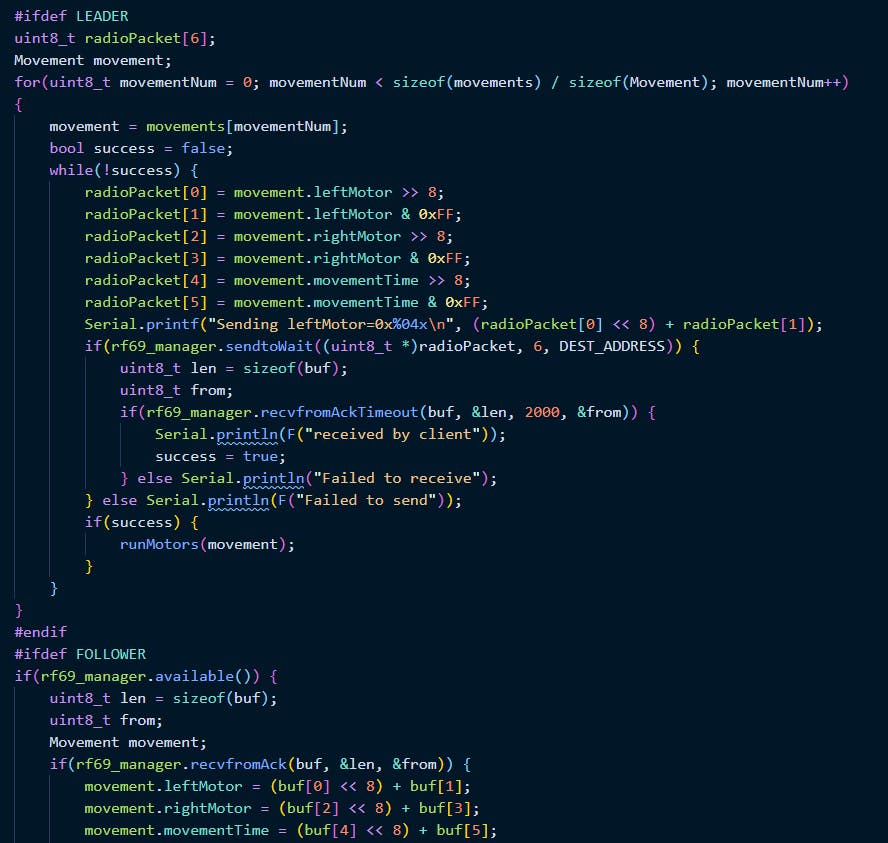
该项目的这一部分可能是最困难的,因为需要同时发生几件事才能在两辆车之间进行任何通信和/或移动。该程序本质上是两个独立的程序,它们通过将“LEADER”或“FOLLOWER”定义为预处理器指令来定义。运动存储为运动结构对象,每个都包含一个左右运动值,以及运动的持续时间。如果一个机器人被指定为领导者,它有一个地址、目的地地址和一系列预先计划好的动作。如果它是跟随者,它只是有一个地址(与领导者的目的地相同)和一个队列来存储其移动历史(稍后使用)。然后,两个设备都会初始化它们的无线电模块和电机引脚。

在主循环内部,leader 遍历每个动作,并以序列化数据包的形式将其发送给接收者。如果它收到成功消息,则领导者继续其移动。同时,follower 等待一个新的运动进来,一旦一个运动到来,它就会将数据包解析成一个运动对象,然后运行电机。
。
正如你所看到的,他们工作得很好。发送者能够将其动作传输给接收者,然后接收者被解码并翻译成相同的动作。将来,我想让发送者机器人自主移动,然后让接收者像车队一样在它后面移动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




