
资料下载


粒子动力机械臂开源构建
李泽坚
分享资料个
描述
项目描述
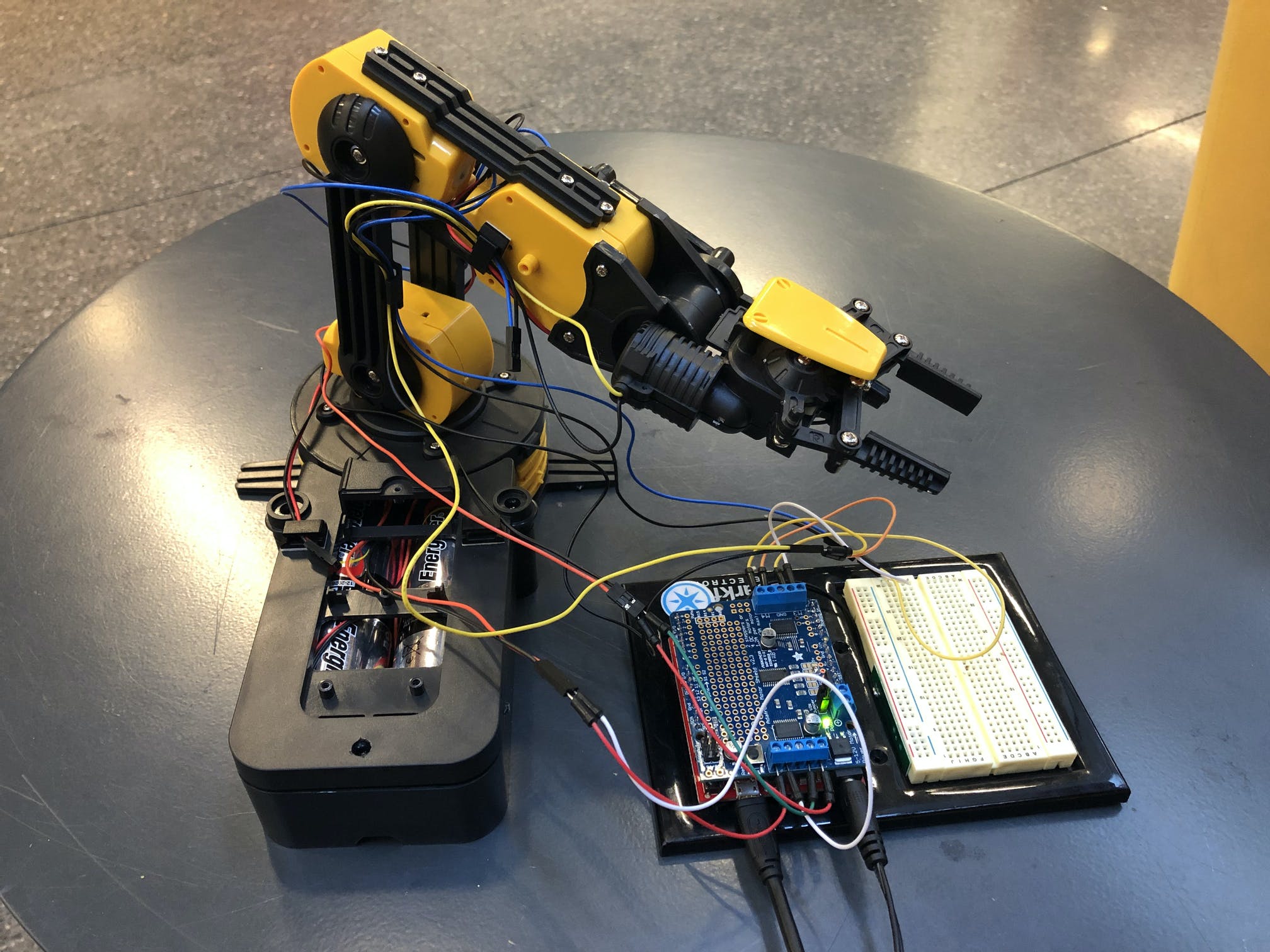
对于这次黑客马拉松,我受到启发,想要创造一个可以通过 USB 数据线或通过互联网无线控制的机械臂。我想使用从亚马逊购买的套件、Sparkfun Photon Redboard 和 Adafruit Motor Shield 来制作手臂。
该项目的目标是构建手臂并创建一个应用程序,允许用户发送从罗技游戏手柄获得的手臂输入。
我成功地组装了手臂并通过将它连接到红板和电机护罩来增加功能。由于黑客马拉松的时间限制,我无法完成项目的应用程序元素。手臂功能正常,因为它可以接收移动单个电机的命令,但必须手动发送命令,因为我还没有实现游戏手柄支持。

我打算继续这个项目。
我遇到的挑战
在创建项目时我遇到了一些挑战。
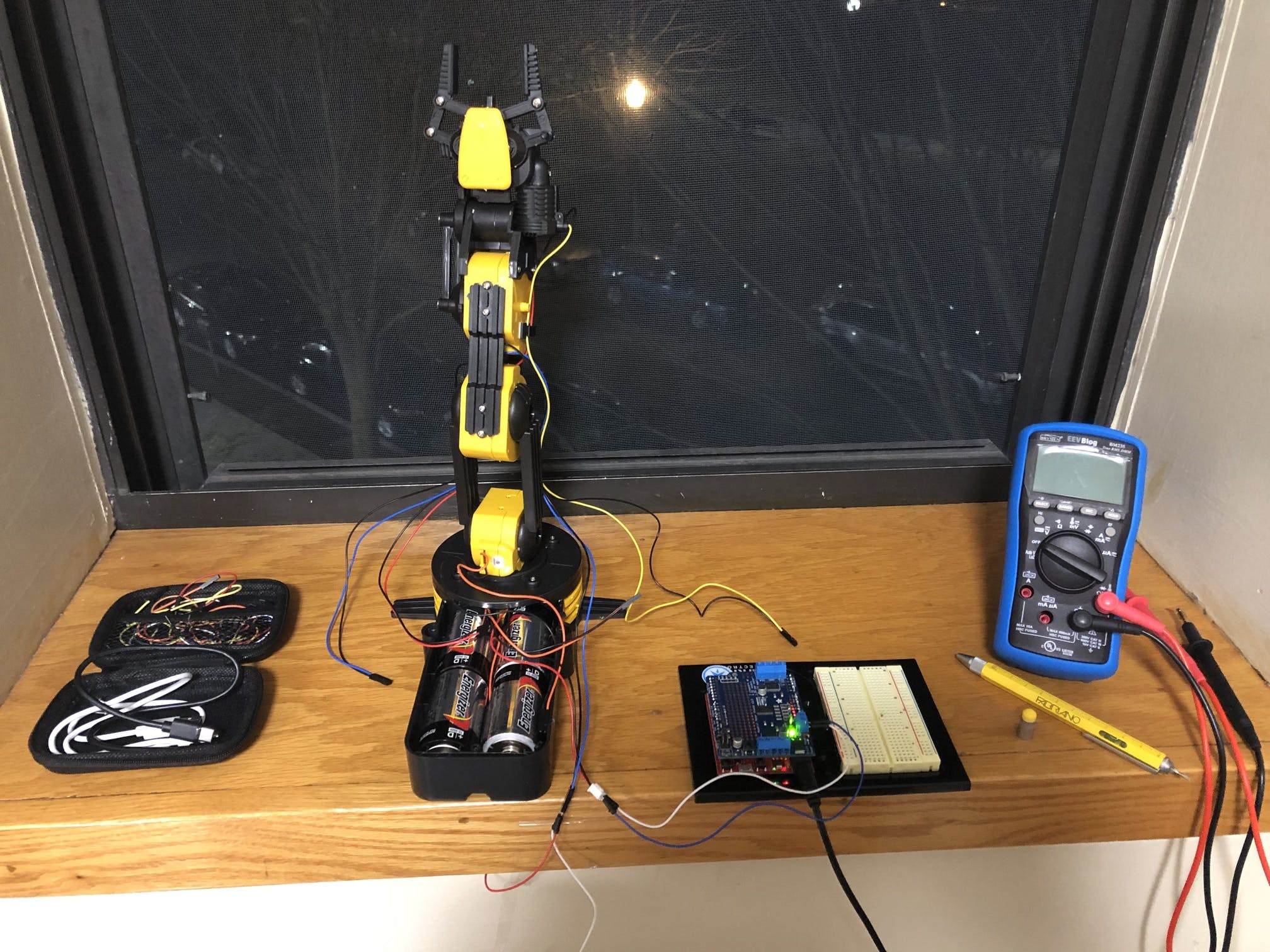
其中一个挑战是,尽管黑客马拉松上有一个“硬件站”,但没有可用的焊接设备或螺丝刀。这是一个重大挫折,因为这意味着我无法完成项目的硬件组件组装,因此无法测试软件是否正常工作。为了解决这个问题,我不得不在黑客马拉松期间乘坐 Lyft 前往 Micro Center,这样我就可以购买焊接套件。那天晚上晚些时候我完成了手臂的组装。
第二个挑战是我和我的合作伙伴都没有足够的时间用 Java 实现应用程序。我以前用 JavaScript 做过类似的应用程序,它收集输入并将有效负载发送到 Particle 设备,但我还没有使用 Java 从游戏手柄获取输入并通过 REST API 发送有效负载。
我引以为豪的成就
我为构建机器人手臂并开发固件来控制它而感到自豪。我本想完成更多的项目,但我还是很喜欢编程马拉松。我学到了更多关于机器人技术和领导项目的知识。
未来的应用
脚本应用程序(使用 Bash 脚本来中继指令列表)
JavaFx 应用程序(使用 Java 和罗技控制器或键盘)
Web 应用程序(使用 Javascript/HTML/CSS)
团队成员
Nathan Robinson (项目负责人)——组装硬件,为机器人手臂控制器开发软件,并创建 API 以允许对手臂进行无线控制。将创建前端图形用户界面,以允许使用游戏手柄无线控制手臂。
J Tarness(市场营销)- 计划了项目的演示并提供了机器人手臂的应用示例。
使用的硬件
使用的技术
Java / JavaFx
JavaScript / HTML / CSS
使用的库
粒子 C++
爪哇
Trello 看板(项目管理)
https://trello.com/b/WkxwAjBQ/robot-arm-project
Travis CI(持续集成测试)
https://travis-ci.org/nrobinson2000/robot-arm
执照
版权所有 (c) 内森·罗宾逊。版权所有。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





