
资料下载


×
基于MSP430F1232自主移动机器人应用研究
消耗积分:0 |
格式:rar |
大小:0.19 MB |
2017-09-07
分享资料个
文章以MSP430系列单片机为核心,提出了一种轮式移动机器人的软硬件设计方案,阐述了其通过传感器网络来进行避障、遍历等自主控制,并实现机器人与PC机间无线控制的方法。
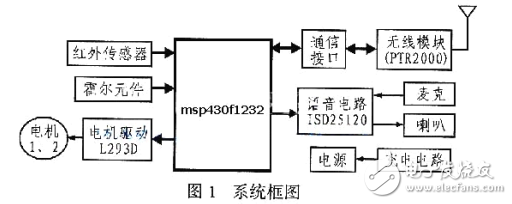
MSP430F1232内含8KB可重复编程快闪存储器、256字节只读存储器(RAM)、多通道脉宽调制PWM计时器、看门狗计时器和USART通讯模块等,采用28脚TSSOP封装,因此易于进行小型化设计。MSP430F1232主要用来产生两路PWM信号,以对传感器信息进行处理。同时,笔者还选用电机驱动芯片L293D来驱动直流电机,并利用霍尔元件来检测电机速度;此外还安装了红外避障和光敏传感器以获取环境信息,并利用语音电路ISD25120来进行交互,而通过微控制器的UART经232接口芯片后利用无线模块PTR2000可与PC机端的无线模块进行通讯。图所示为其系统框图。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




