
资料下载


×
基于误差四元数行人惯导系统设计(Kalman滤波优化)
消耗积分:0 |
格式:rar |
大小:0.82 MB |
2017-10-30
分享资料个
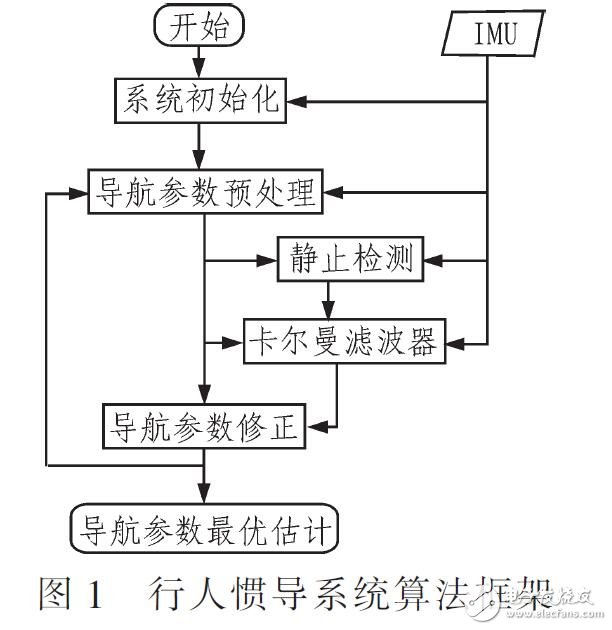
行人惯性导航系统(Pedestrian Inertial Navigation System,PINS ),是利用陀螺仪、加速度计、磁强计组合而成的低精度惯性测量单元(I nert ial MeasurementU nit,IMU )所采集的数据,解算出行人实时姿态及位置信息,属于自主式的导航系统。由于IMU 输出存在误差,通过积分计算姿态角、速度、位移信息产生大量误差累积,因此误差修正是PINS 算法研究当中的重要课题。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






