
资料下载


×
超像素分割的快速立体匹配
消耗积分:0 |
格式:rar |
大小:1.02 MB |
2017-11-15
分享资料个
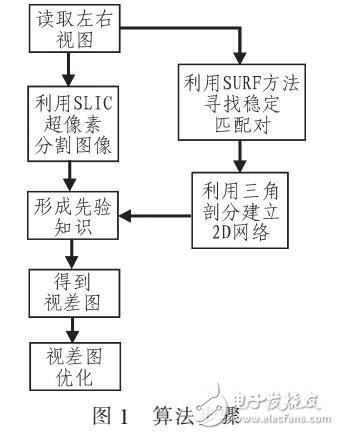
针对目前立体匹配中存在的匹配精度和匹配速度很难兼顾的问题,提出了一种基于稳定特征点和SLIC超像素分割算法的快速立体匹配。利用SURF算法高速有效地提取出特征点进行匹配,并且利用三角剖分的方法对稳定特征点作进一步处理,以此匹配作为先验知识来减少其余各点的匹配误差和搜索空间,同时又加入了SLIC超像素分割算法的限制因素进一步提高精度,这样使得立体匹配算法在精度上和速度上都得到了很好的提高。对Middleburv中的标准数据进行测试的结果表明,该算法能较为快速准确地获得视差。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章


下载排行榜
- 暂无相关数据

