
资料下载


×
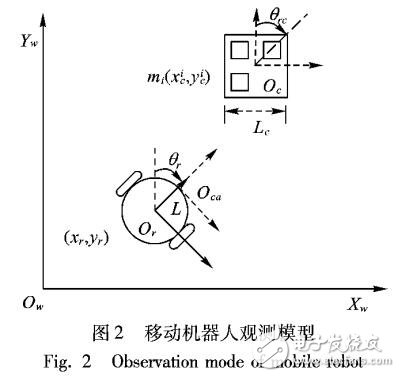
基于视觉信标的仓储物流机器人定位方法
消耗积分:1 |
格式:rar |
大小:0.75 MB |
2017-11-28
分享资料个
针对轮式仓储物流机器人的自主定位问题,提出了一种基于视觉信标和里程计数据融合的室内定位方法。首先,通过建立相机模型巧妙地解算信标与相机之间的旋转和平移关系,获取定位信息;然后,针对信标定位方式更新频率低、定位信息不连续等问题,在分析陀螺仪和里程计角度误差特点的基础上,提出一种基于方差加权角度融合的方法实现角度融合;最后,设计里程计误差模型,使用Kalman滤波器融合里程计和视觉定位信息弥补单个传感器定位缺陷。在差分轮式移动机器人上实现算法并进行实验,实验结果表明上述方法在提高位姿更新率的同时降低了角度误差和位置误差,有效地提高了定位精度,其重复位置误差小于4 cm,航向角误差小于2°。同时该方法实现简单,具有很强的可操作性和实用价值。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





