
资料下载


×
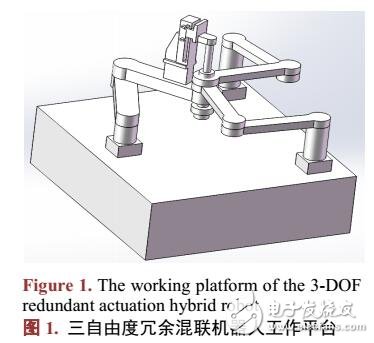
一种三自由度冗余驱动混联机器人的设计
消耗积分:2 |
格式:rar |
大小:2.63 MB |
2018-01-05
分享资料个
对机器人进行相应的优化设计可以使机器人具有更好的结构性能与工作性能。以一种三自由度冗余驱动混联机器人为研究对象,对该机器人尺寸参数无量纲化并分析该机器人可达的工作空间,进而在混联机器人工作空间中找出最优杆件尺寸和位置参数,绘出该混联机器人在其工作空间中的性能图谱。采用Solidworks软件建立优化后的三自由度冗余驱动混联机器人的三维模型,并导入到ADAMS中对其进行动态仿真分析,其分析结果与性能图谱中各性能指标分布规律相一致,验证了机构各项性能指标分析的准确性以及优化方法的合理性,其仿真结果为类似机器人机构的优化提供参考。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





