
资料下载


×
Scorbot ER-V+自由度机器人手臂控制器和模拟器设计
消耗积分:0 |
格式:zip |
大小:0.38 MB |
2023-07-10
分享资料个
描述
SCORBOT ER-V+ 5 自由度机器人手臂控制器和模拟器设计
来自 Amit Kumar Nandi 的问候。
该项目最初是作为一项恢复旧的非工作 scorbot 机器人的倡议而启动的。该项目有2个主要部分:
- 硬件控制器设计
- 软件模拟器
硬件设计使用 PID 控制每个关节的电机位置,来自正交旋转编码器的反馈,并命令电机驱动器移动以纠正位置误差。完整的工业紧急联锁控制系统设计,通过 LED 进行诊断,并在集成显示屏上显示错误状态。给出了示教器功能,并且在该项目中还实现了从任何计算机对机器人进行编程的附加串行接口。机器人配置为 5dof + 夹具,所有 5 个关节都是旋转的 (5R)。
软件是在 Debian 中使用 MATLAB 和 ROS 节点设计的。在 ROS 中,设计了机器人手臂模型,并使用 MATLAB 实现了在位置空间中操纵机器人手臂的所有逆/正运动学方程。使用 C++ 设计了一个自定义的 MATLAB 工具箱,并使用 MATLAB GUI 库实现了具有示教功能和可视化功能的键盘控制。所有的软件模拟器代码都可以在我的找到GitHub.

机械臂

控制器
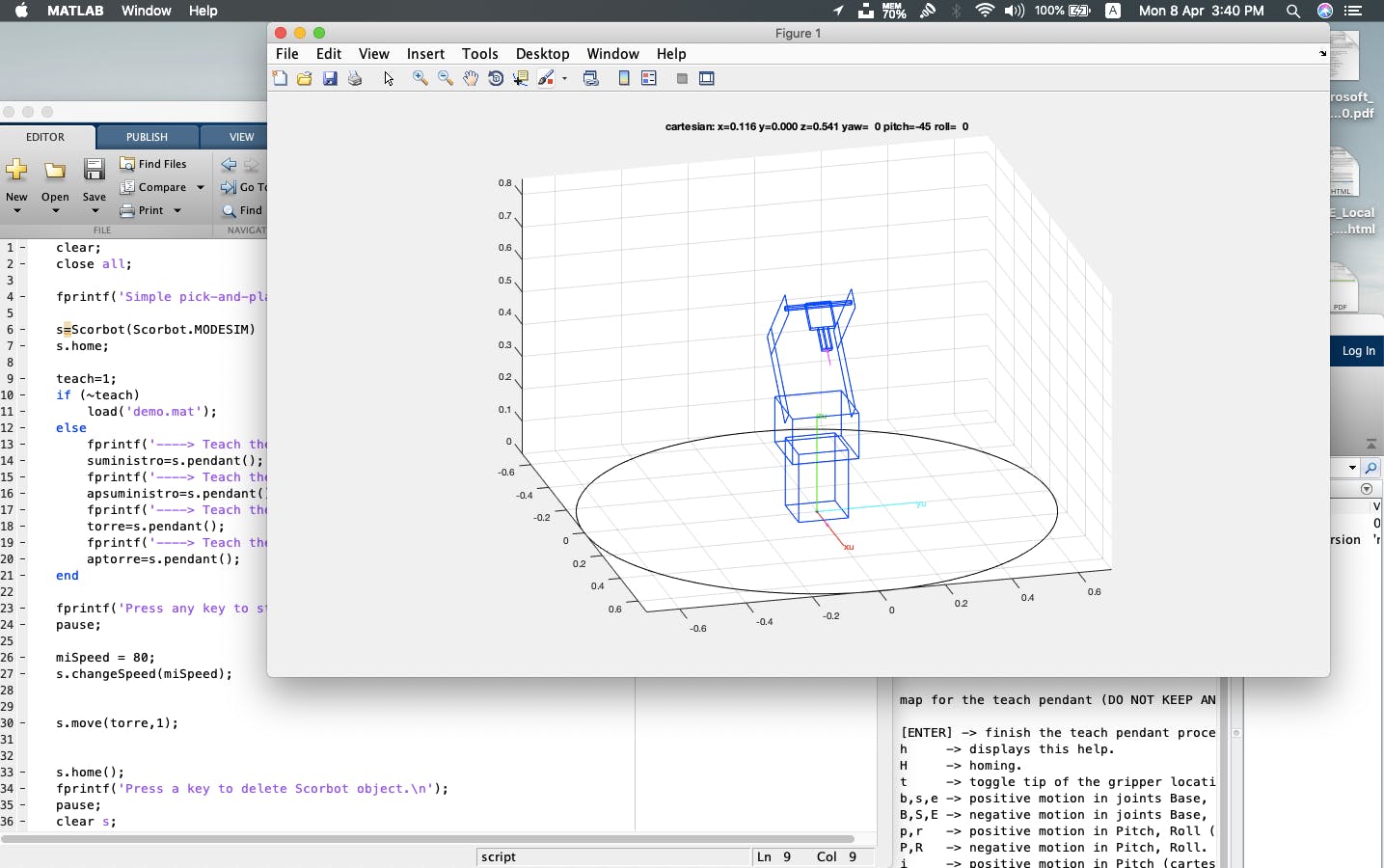
模拟器用户界面
。
FMS LAB、Birla Institute of Technology、Mesra 提供
更多工作在:https://aamitn.github.io
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





