
资料下载


×
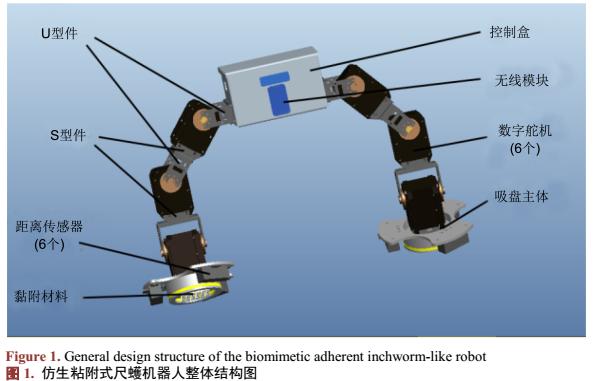
一种结合壁虎刚毛粘附材料和尺蠖运动形式的仿生粘附式尺蠖机器人
消耗积分:2 |
格式:rar |
大小:5.81 MB |
2018-01-29
分享资料个
本文针对未来空间寄生武器发展的需要,提出了一种结合壁虎刚毛粘附材料和尺蠖运动形式的仿生粘附尺蠖机器人。本文首先对仿生粘附式尺蠖机器人的机构、电气系统和控制策略进行总体设计,并设计出机器人各电气元件之间的接口关系和半自主的控制策略。设计了粘附吸盘的主体结构和粘附材料结构,并完成了粘附材料的对比选型和粘附力计算。为粘附吸盘设计了3个距离传感器,并完成了基于距离传感器的粘附吸盘和目标表面的位姿解算。采用Deanvit-Hartenberg方法对仿生粘附式尺蠖机器人进行了运动学建模,并进行了机器人的步态规划,设计了机器人的“一字”步态。最后利用Adams软件搭建机器人的虚拟样机模型,对尺蠖机器人的“一字”步态进行了仿真,验证了步态规划结果的准确性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





