
资料下载


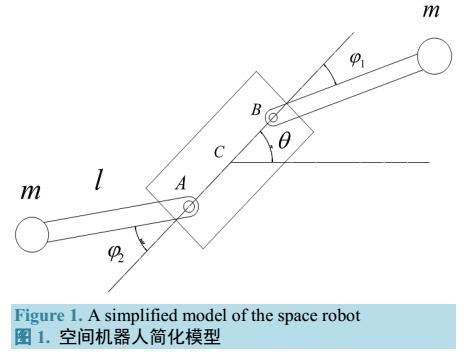
基于Legendre伪谱法的空间机器人姿态运动的最优控制
分享资料个
随着空间技术飞速发展,宇航员在太空环境下的高危作业正逐步被空间机器人所替代。自由漂浮空间机器人在节省能源,提高生产效益,扩大空间站的作用等方面具有重要的意义。双臂空间机器人载体处于自由漂浮状态,载体的姿态会随着机械臂的相对运动而发生变化,增大了载体姿态控制难度的同时,为控制其姿态也提供了一种方法。Fernandes等根据空间机器人的非完整性质提出空间机器人的关节运动规划的最优控制方法;Nakamura等提出了非完整运动规划的双向Lyapunov方法;戈新生等利用非线性系统最优控制原理,给出了一类带有非完整约束的多体系统运动规划的最优数值方法。
伪谱法是一种基于全局插值多项式的直接配点法。伪谱法具有精度高、效率高等优点,并且具有收敛性,伪谱最优控制理论己被用于在军事和工业应用中的地面和飞行系统中。伪谱法传统上主要应用于流体力学,近年来得到了相对广泛的研究剐吲。Legendre伪谱法的算法具有可行性、一致性以及收敛性。该方法以Legendre-Guass-Lobatto (LGL)点作为插值节点,以Lagerange插值基函数来逼近所求状态变量,能够用较犬积分步长得到较高精度。本文采用Legendre伪谱法进行姿态规划的最优控制,讨论了自由漂浮双臂空间机器人姿态控制问题。根据在自由漂浮的情况下系统总的动量矩守恒关系推导出系统的动力学方程。然后利用Legendre伪谱法将问题进行离散化,将其转化为非线性规划问题进行求解。最后采用该方法对空间双臂机器人进行数值仿真,验证其对该姿态运动规划问题的有效性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





