
资料下载


×
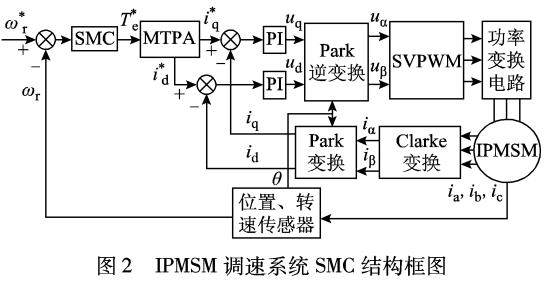
IPMSM调速系统滑模变结构控制
消耗积分:2 |
格式:rar |
大小:2.74 MB |
2018-03-06
分享资料个
为了提高内置式永磁同步电机(IPMSM)调速系统的动、静态性能,提出了一种基于新型变速趋近律的滑模控制器,该新型趋近律基于反双曲正弦函数,根据系统状态量,采取变带宽趋近方式,可有效抑制系统的稳态转矩脉动。为解决滑模控制中电机起动时响应速度快与起动电流大的矛盾,提出了一种基于PI和滑模控制(SMC)的混合速度控制器(HSC),该混合速度控制器中滑模控制基于新型趋近律,通过控制器输入值的大小选择控制方式,有效解决了上述矛盾问题,且该控制器可进一步提高系统的响应速度并能进一步抑制稳态转矩脉动。通过仿真和实验,验证了该速度控制器和该新型趋近律的可行性以及有效性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 Dtttk
2020-09-21
0 回复 举报赞一个 收起回复
Dtttk
2020-09-21
0 回复 举报赞一个 收起回复
- 相关下载
- 相关文章





