
资料下载


以MK60N512VMD100微控制器为核心控制单元的智能车设计的详细概述
王仕敬
分享资料个
本文是关于基于第十二届全国大学生“恩智浦”杯智能车竞赛设计的智能车,整车的系统以 MK60N512VMD100 微控制器为核心控制单元,通过面阵 CCD 检测识别信标,线性 TSL1401CL 线性 CCD 检测未点亮的信标作避障处理,并使用光电编码器检测模型车的实时速度,利用 PID 控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。为了提高模型车的速度和稳定性,使用上位机、无线蓝牙、键盘液晶模块等调试工具,进行了大量硬件与软件测试。实验结果表明,该系统设计方案确实可行。
随着信息技术的发展,汽车的电子化模块越来越多,智能汽车领域受到了大量的关注。受教育部高等教育司委托,高等学校自动化专业教学指导分委员会主办“恩智浦”杯全国大学生智能汽车竞赛,以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的科技创意性比赛。
参赛选手须使用竞赛秘书处统一指定并负责采购竞赛车模,自行采用 32 位微控制器作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,完成智能汽车工程制作及调试,于指定日期与地点参加场地比赛。参赛队伍之名次(成绩)由赛车现场成功完成赛道比赛时间为主,技术方案及制作工程质量评分为辅来决定。
本届“恩智浦”杯全国大学生智能汽车竞赛比赛分为光电竞速类、电磁类、双车追逐类和创意类四个大类,分别进行比赛,我队参与创意组双车对抗组比赛。此次比赛按照官方规定可任意车模,最终我们选择 新 C 型车模,使用面性 CCD 组结合线性 CCD 进行检测。
本篇技术报告主要包括机械系统、硬件系统、软件系统等,详尽地阐述了我们的设计方案,具体表现在硬件电路的创新设计以及控制算法的独特想法,我队参与比赛来的经验之谈,希望能给大家带来帮助。
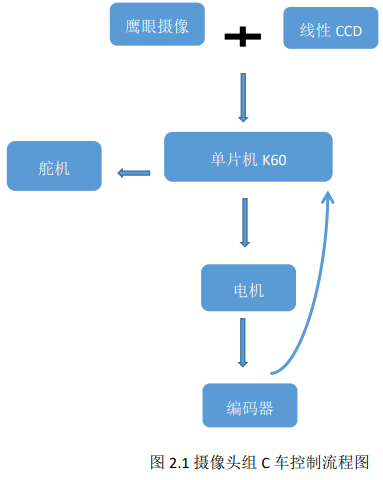
智能车主要由三个部分组成:检测系统,控制决策系统和动力系统。其中检测系统采用鹰眼摄像头和线性 CCD,控制决策系统采用 MK60 作为主控芯片,动力系统主要控制舵机的转角和直流电机的转速。
整体的流程为,通过数字摄像头来检测赛场信标位置信息,并将信息发送给单片机。同时,通过光电编码器构成的反馈渠道将车体的行驶速度信息传送给主控单片机。根据所取得的位置信息和车体当前的速度信息,由主控单片机做出决策,并通过 PWM 信号控制直流电机和舵机进行相应动作,从而实现车体的转向控制和速度控制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




