
资料下载


×
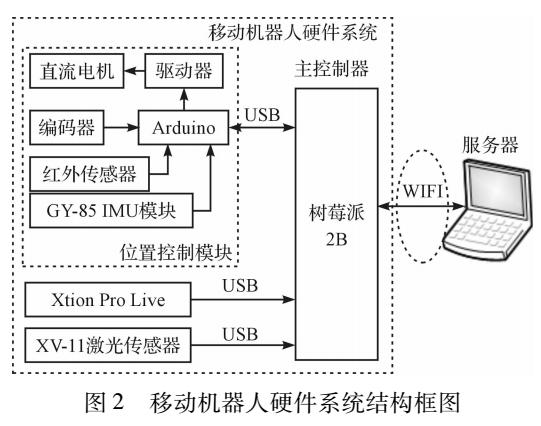
开源移动机器人系统设计
消耗积分:2 |
格式:rar |
大小:0.77 MB |
2018-03-09
分享资料个
随着科技的发展,移动机器人越来越多在工业、农业、军事和医学等领域得到广泛的应用,然而要使移动机器人实现自主化首先面临的问题就是如何实现机器人创建所处环境的地图并同时利用该地图进行定位(即同时定位与地图创建),现已成为国内外许多研究机构和学者研究的重点,并开发了各种各样的移动机器人进行相关方面的研究,例如:法国的HI-LARE移动机器人、美国DARPA公司的白主陆地车ALV、美国Ac工ivmedia公司的Pioneer系列机器人、中科院白动化所的室内自主轮式机器人CASIA-I、清华大学的工HMR机器人和上海交通大学的交龙机器人等。虽然这些机器人性能强大,但是价格昂贵、软件代码不开源且通用性差,如果从头到尾开发机器人的软硬件系统会造成开发难度大和周期长等问题。
针对这些不足,本研究采用开源机器人操作系统,设计一种低成本、高性能的开源移动机器人系统进行SLAM等方面的研究。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





