



STM32H5开发陀螺仪LSM6DSV16X(5)----上报匿名上位机
STM32H5开发陀螺仪LSM6DSV16X(4)----中断获取SFLP四元数
STM32H5开发陀螺仪LSM6DSV16X(3)----SFLP获取四元数

STM32H5开发陀螺仪LSM6DSV16X(2)----轮询获取磁力计数据
STM32H5开发陀螺仪LSM6DSV16X(1)----轮询获取陀螺仪数据

STM32H5开发VL53L8CX(5)----运动阈值检测

STM32H5开发VL53L8CX(4)----运动指示器

STM32H5开发VL53L8CX(3)----检测阈值

STM32H5开发VL53L8CX(2)----设置自主模式
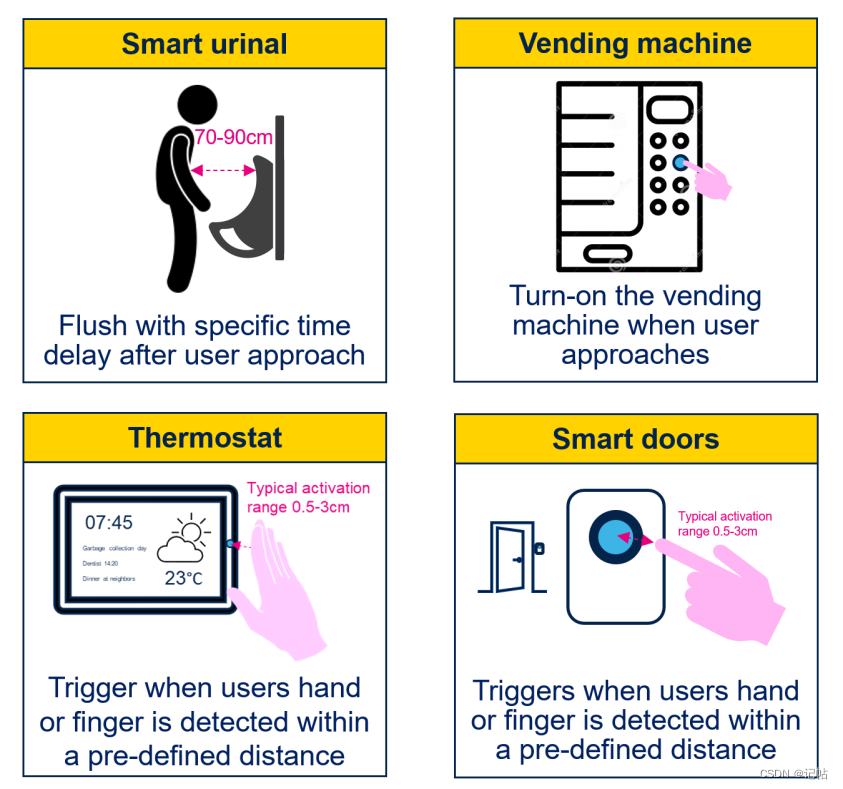
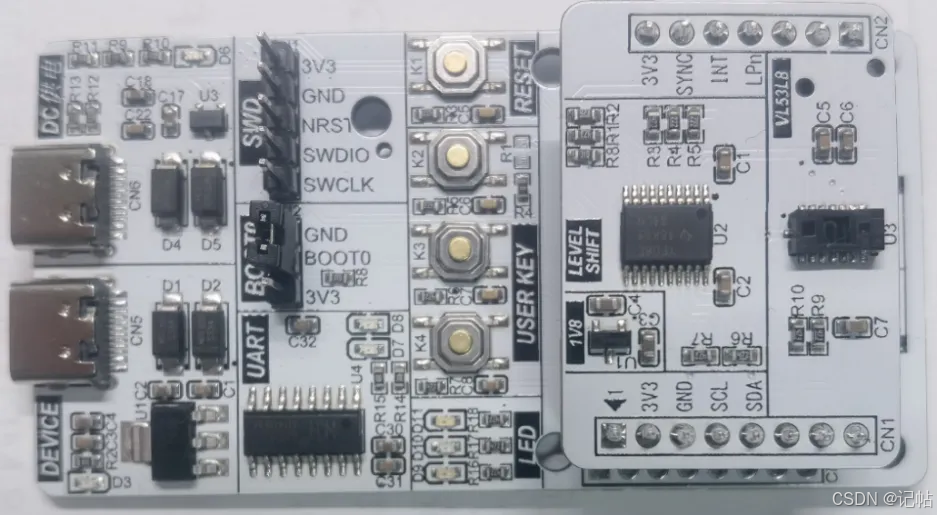
STM32H5开发VL53L8CX(1)----驱动TOF进行区域检测

VL53L8CX小板开发(5)----运动阈值检测

2024年度技术总结——MCU与MEMS和TOF应用实践

VL53L8CX小板开发(4)----运动指示器
VL53L8CX小板开发(3)----检测阈值
气压计LPS28DFW小板开发(2)----水压检测
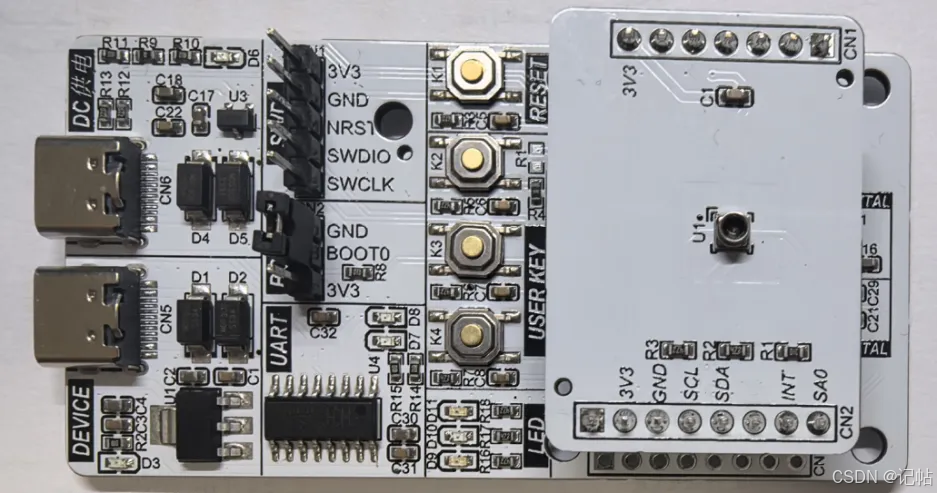
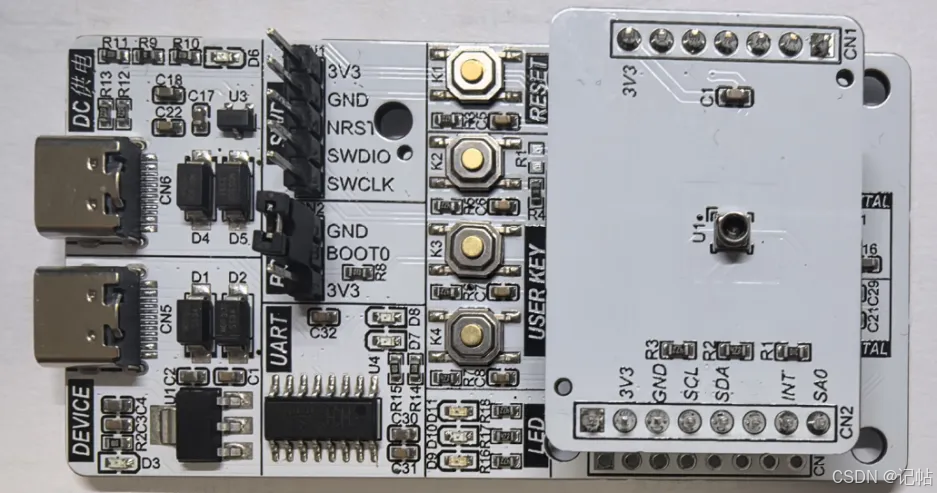
气压计LPS28DFW小板开发(1)----轮询获取气压计数据

VL53L8CX小板开发(2)----设置自主模式
VL53L8CX小板开发(1)----驱动TOF进行区域检测

VL53L1CB小板开发(2)----修改测距范围及测量频率

VL53L1CB TOF开发(1)----驱动TOF进行测距
