
资料下载


Delta机器人的正向和反向运动学库
张玉珍
分享资料个
描述
Delta 机器人的正向和反向运动学库。

Delta 运动学设置
功能
设置
DeltaKinematics(双臂长、双杆长、双 BassTri、双 PlatformTri)
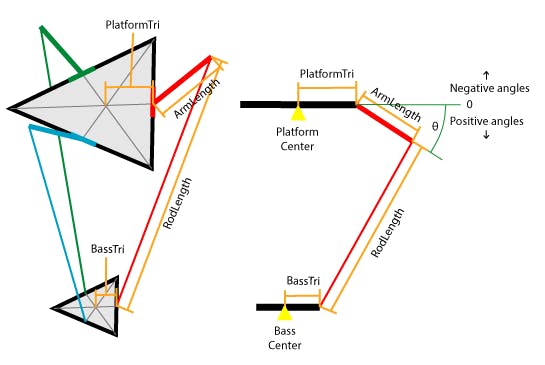
该 Fuction 设置类来计算 delta 的正向和反向运动学。ArmLength、RodLength、BassTri 和 PlatformTri 是来自 Delta 机器人的设定值。请参阅上图以了解如何进行测量。
毫米、米、英寸或任何其他长度测量可用于 ArmLength、RodLength、BassTri 和 PlatformTri。x、y 和 z 的测量值必须相同。
ArmLength、RodLength、BassTri 和 PlatformTri 建议使用毫米
设置
诠释向前()
int forward(双 thetaA,双 thetaB,双 thetaC)
此功能用于计算 delta 的正向运动学。可以使用变量 a、b 和 c 或在带有 ThetaA、thetaB 和 thetaC 的函数中设置计算。
ThetaA、thetaB 和 thetaC 值以度为单位。a、b 和 c 值以度为单位(请参阅下面的变量)。见上图。
整数逆()
int 逆(双 x0,双 y0,双 z0)
该函数用于计算 delta 的逆运动学。可以使用变量 x、y 和 z 或在函数中使用 x0、y0 和 z0 设置计算。
建议 x、y 和 z 使用毫米
变量
双 x,双 y,双 z
这些变量(x、y 和 z)并被读写。它们用于设置 Delta 机器人运动学平台的位置。如果计算正向运动学,则返回值放在 x、y 和 z 中。
建议 x、y 和 z 使用毫米
双a、双b、双c
这些变量(a、b 和 c)并被读写。它们用于为运动学设置 Delta 机器人电机的角度。如果计算逆运动学,则返回值放在 a、b 和 c 中。
a、b 和 c 值以度为单位。见上图。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





