
资料下载


×
使用Arduino Pro Mini构建四轮驱动机器人
消耗积分:0 |
格式:zip |
大小:0.00 MB |
2023-06-20
分享资料个
描述
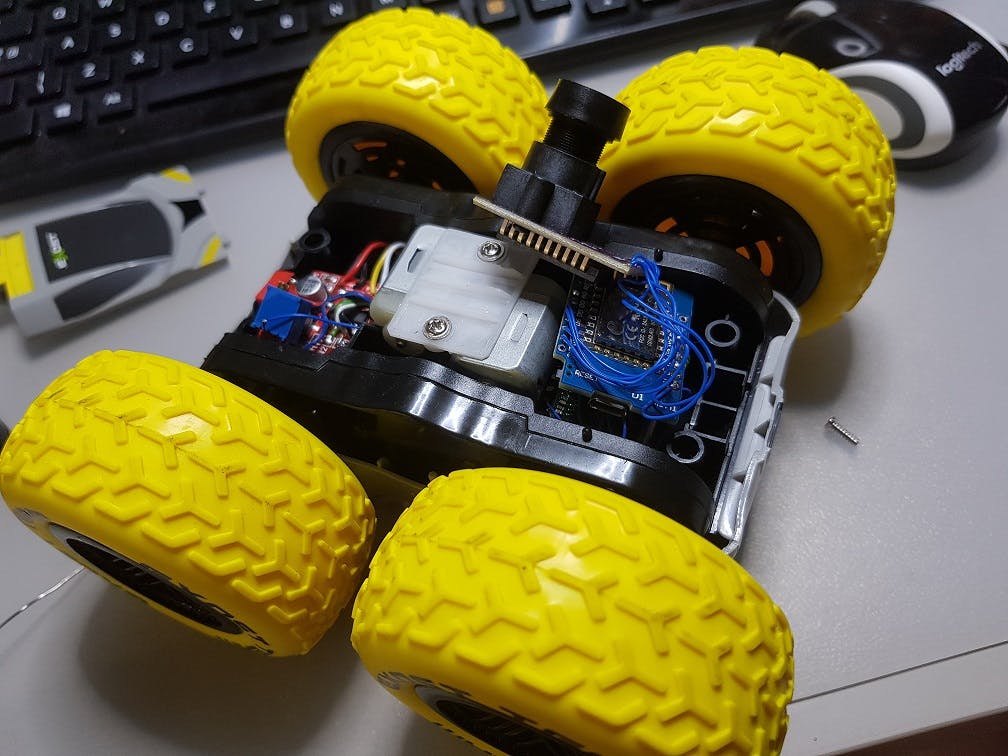
我试图使用 Arduino Pro Mini 构建一个四轮驱动机器人,它利用两个 A3080 鼠标传感器进行测距。遗憾的是,该项目从未完成,我拆解了机器人并建造了一个平衡机器人。然而后来我决定不放弃四轮驱动机器人并订购了几个具有适当光学器件的ADNS3080传感器,获得了一个电动轮子玩具,这导致了这款WiFi控制玩具车的诞生。
可以在 此处找到该项目的源代码。更详细的文章在这里。
怎么运行的
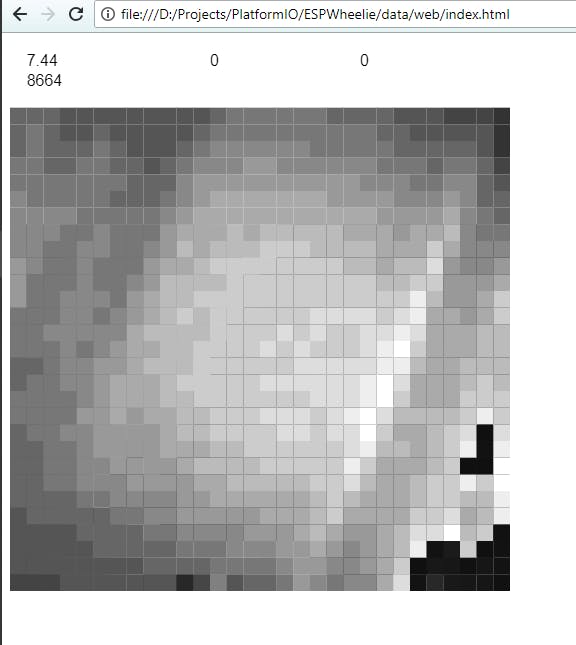
中国 HBridge 驱动程序和 ADNS3080 鼠标传感器模块连接到 Wemos D1 mini,它提供一个简单的网页,允许使用触摸手势控制机器人。使用 ADNS3080 检索的图像使用 WebSockets 传输到网页以及发送给机器人的命令。
该机器人使用两节 LiPo 1200mAh 电池组成 2S1P 电池供电。连接到 GND 和 Battery Plus 的电位器可缩放电池电压,该电压被馈送到 Wemos 板的模拟引脚,随后显示在网页上。
从机械上讲,该机器人由四个轮子组成,每侧独立旋转。有趣的是,这个玩具有两个同侧的轮子连接到一个电机。这样所有两对轮子都像在坦克中一样独立旋转。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




