
资料下载


Nox:差动驱动机器人的构建
王银喜
分享资料个
描述
Nox 是一款使用 ROS、Raspberry Pi 和 Arduino 构建的差动驱动机器人。我开始这个项目是作为一个具有基本导航功能的机器人基地,然后我可以将其用于其他用途,例如真空吸尘器。然而,我很快决定将它做成一个具有适当设计的独立机器人,因为它在 DIY 机器人中经常缺失。在当前状态下,机器人可以使用 SLAM(gmapping)创建其周围环境的地图(使用 Kinect 深度感知来检测墙壁和障碍物)并在地图内定位自己。它可以规划通往给定目标的路径并避开障碍物。
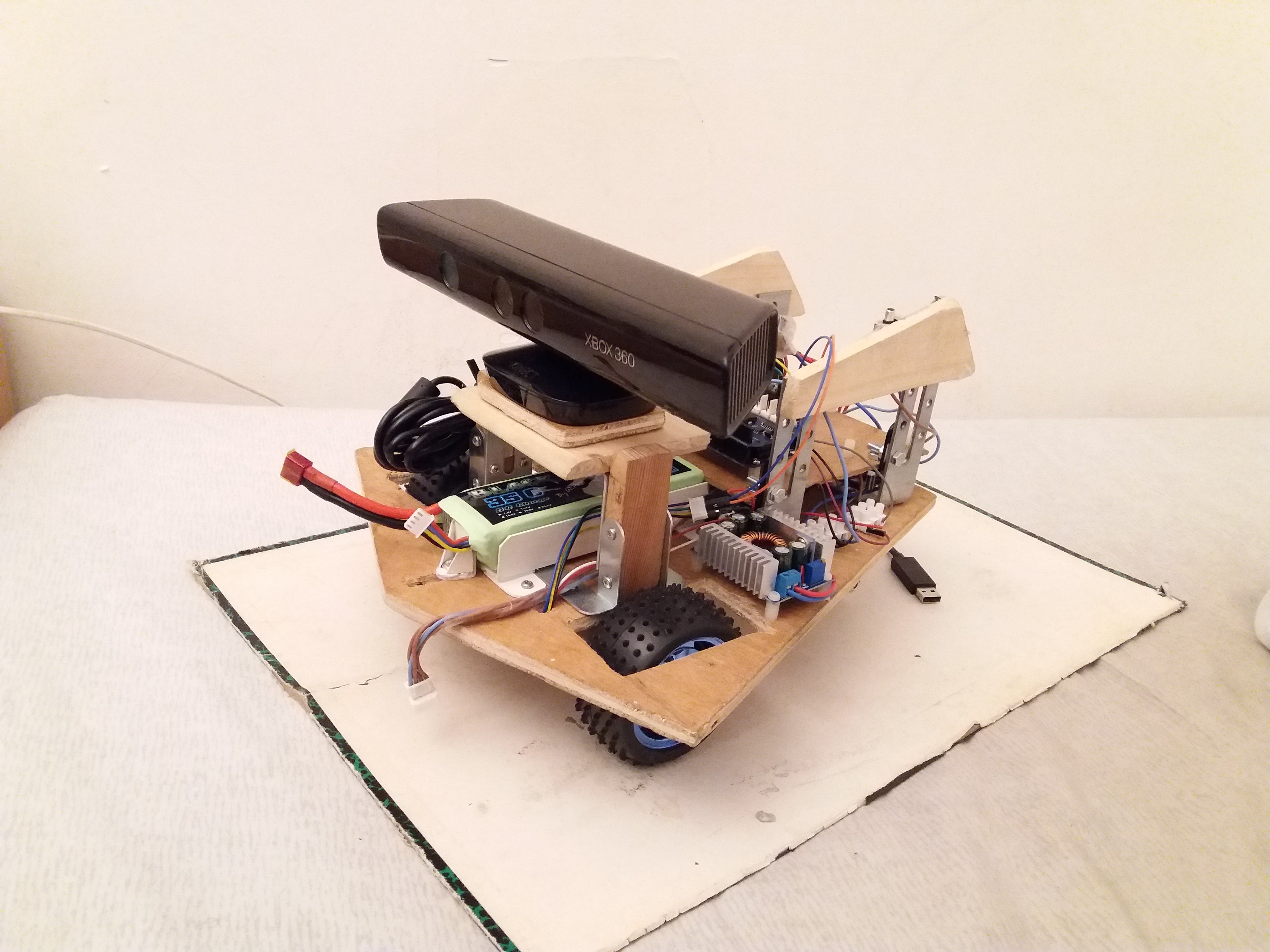
Nox 由 11.1v 锂离子电池供电,由两个电机驱动。可以卸下前面板以更换电池。一个长孔和一个螺丝固定它并允许放置不同长度的电池。我在屏幕上放了一个电池警报器来监控电量。
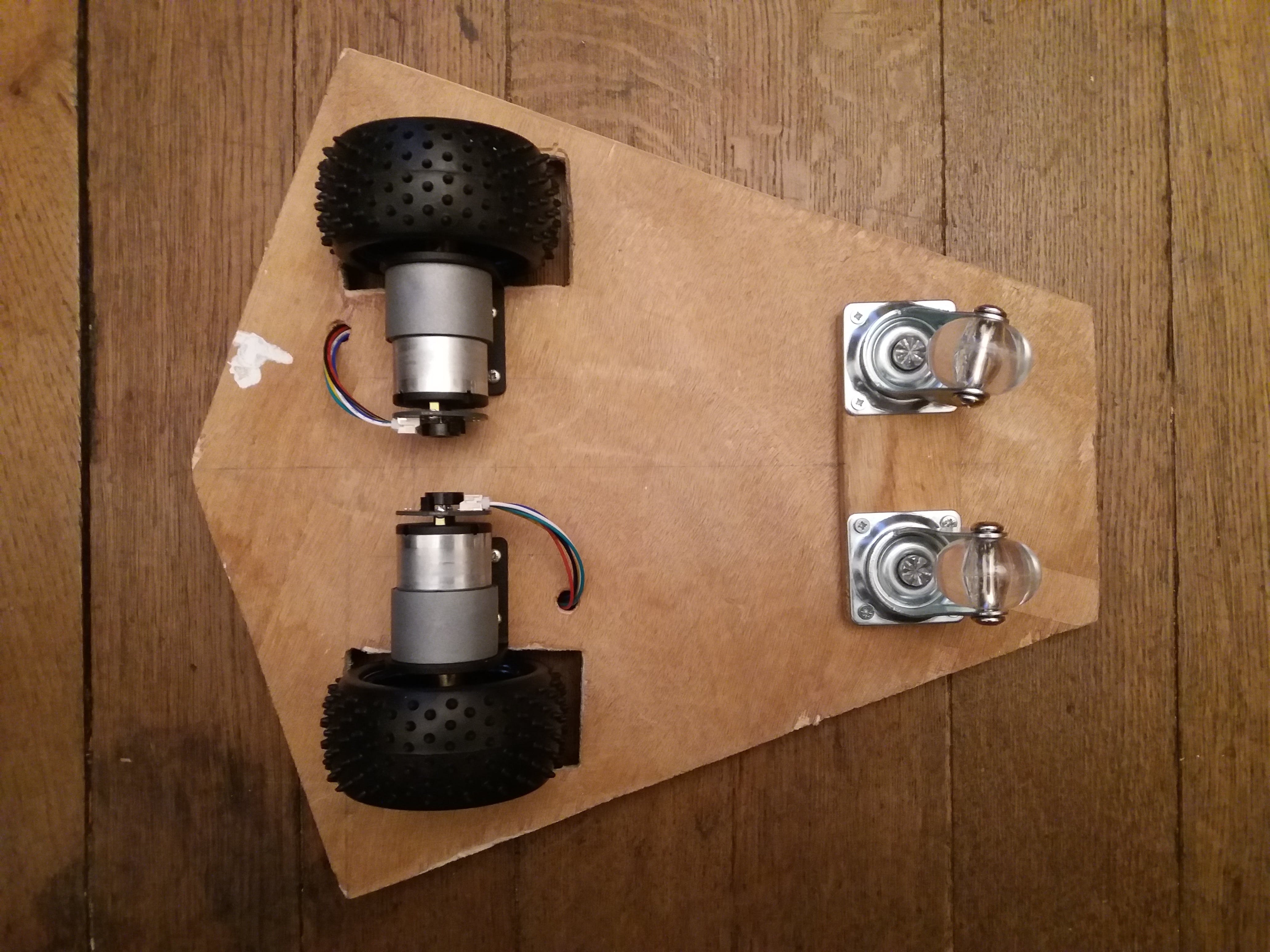
电机是 Banggood 的两个 12v 直流电机 (107rpm ) 。它们很好,但实际上我不需要机器人走得那么快,我可以用一些速度换取更精确的编码器。
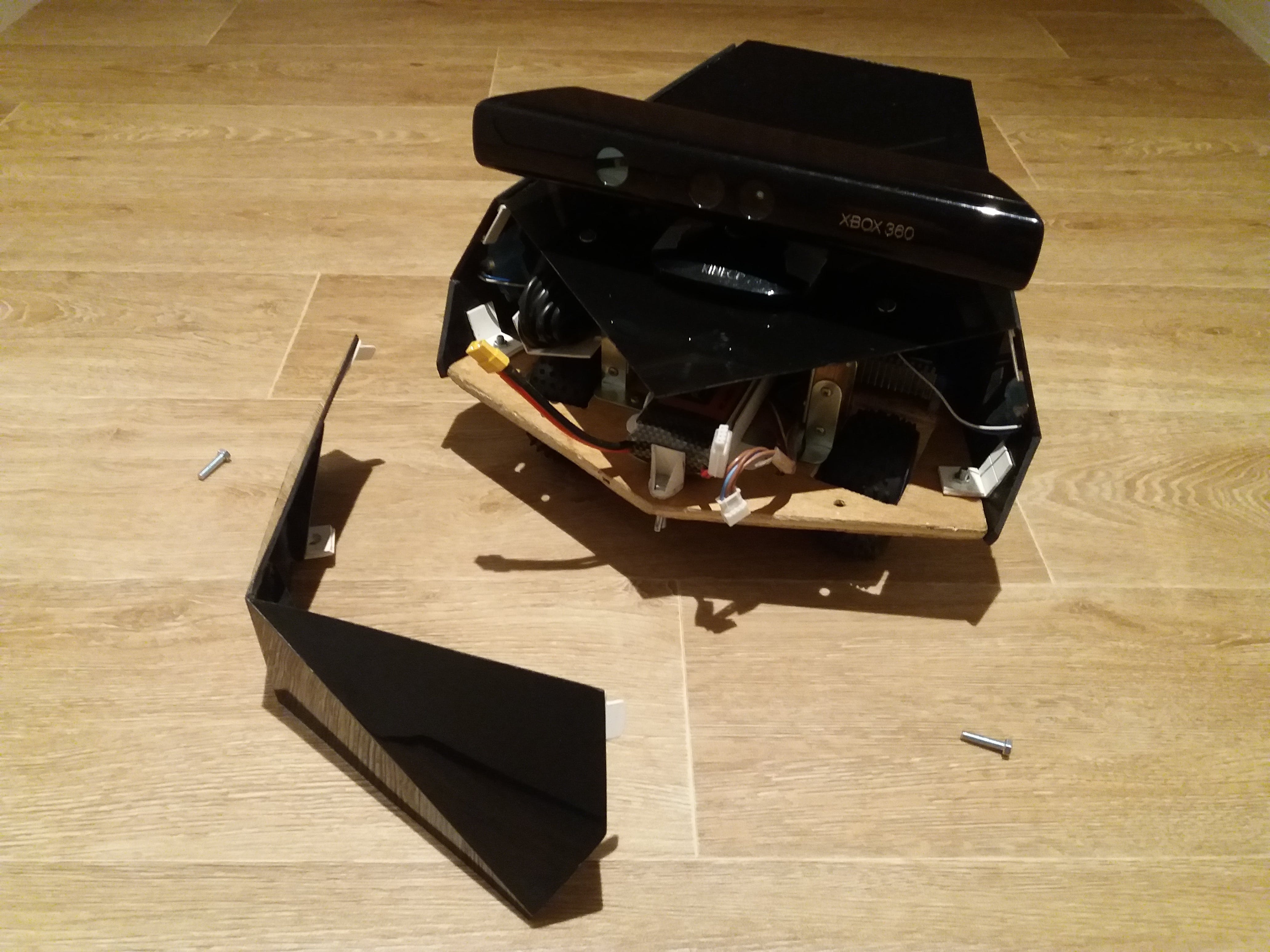
关于设计,主要的限制是要有与 Kinect 良好集成的东西,因为我正在围绕它构建机器人。我的灵感来自于许多现代风格物品的三角形外观(我不得不承认很多来自 Deus Ex)。我真的很想拥有一个漂亮且专业的机器人,因为它是 DIY 机器人中经常缺少的东西(但不要担心布线会像它应该的那样混乱)。花几周时间在 CAD 模型上调整所有内容是必要的。
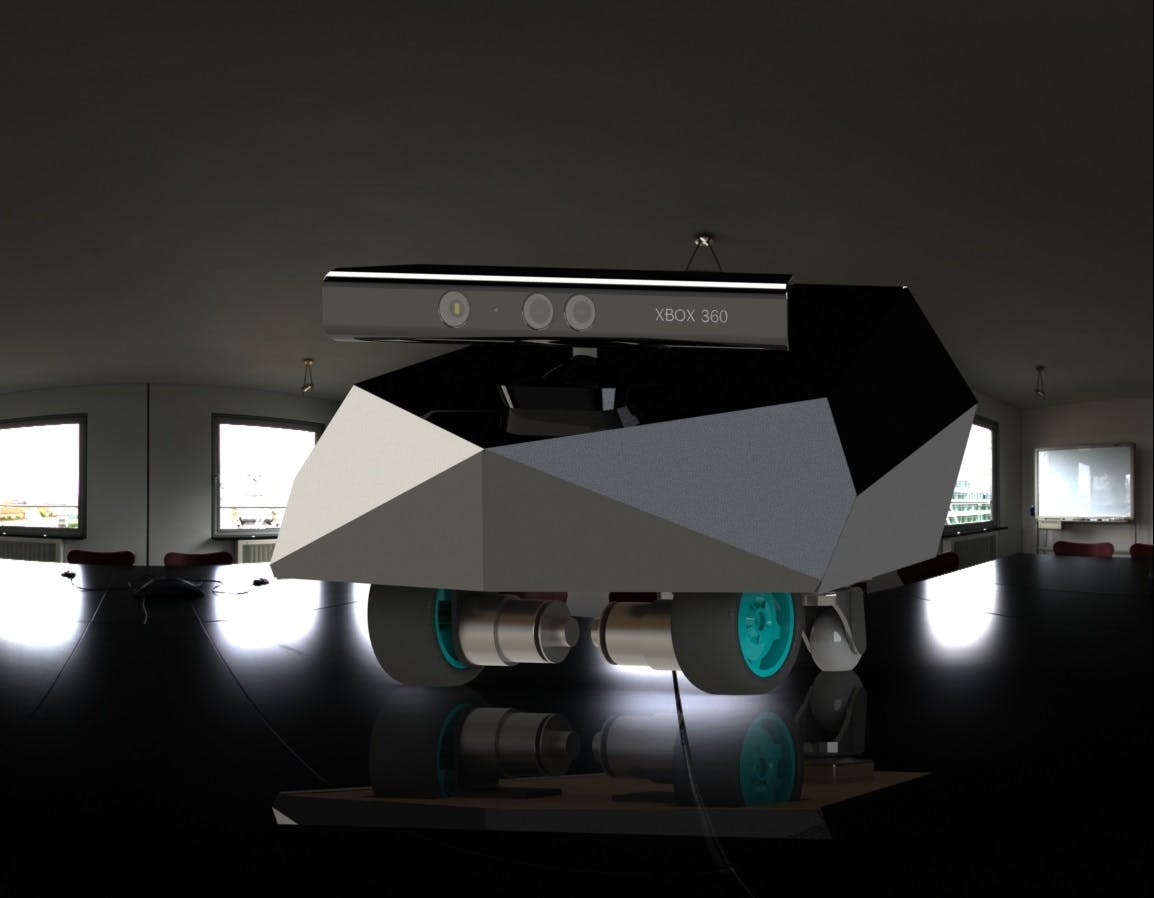
侧面的灯是从我免费得到的除夕夜发光棒回收的,用于指示机器人状态。当 Arduino 没有连接到 ROS master 时(表示机器人程序还没有启动),灯会很快连续闪烁 3 次。行驶时,灯会像“呼吸”一样闪烁,闪烁速度取决于机器人的速度。
结构
如上所述,该机器人是差动驱动的,因此电机放置在同一轴上。底座由木头制成,带有两个用于支撑的脚轮。我最初计划使用一个脚轮来避免超静电现象,但找不到尺寸合适的脚轮。结构的其余部分主要由木头和金属支架制成,在任何 DIY 零售店都很容易找到。在机器人板的后部可以堆叠以放置电子板。
carter是黑色塑料板做的,手工切割粘上(下次肯定用3D打印)。

。
- " Raspberry Pi 和 PC (ROS) 之间的通信" by mktk1117
- Evangelos Papadopoulos 和 Michael Misailidis 的“ On Differential Drive Robot Odometry with Application to Path Planning ”
- Turtlebot程序
- 来自和歌山大学的 Shuro Nakajima 教授,在那里我有机会通过参与 PMV(个人机动车辆)项目学习(检查它很棒)
- ROS社区里和我遇到同样问题的人和回答他们的人
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




