
资料下载


ROS是什么?机器人操作系统ROS的介绍
分享资料个
ROS 是 Robot Operating System 的缩写,原本是斯坦福大学的一个机器人项目,后
来由 WillowGarage 公司发展,目前由 OSRF(Open Source Robotics Foundation,Inc)
公司维护的开源项目。
1、首先是一个操作系统
根据 wikipedia 定义,操作系统是用来管理计算机硬件与软件资源,并提供一些公用的
服务的系统软件。而 ROS 也自称是一个 OS。
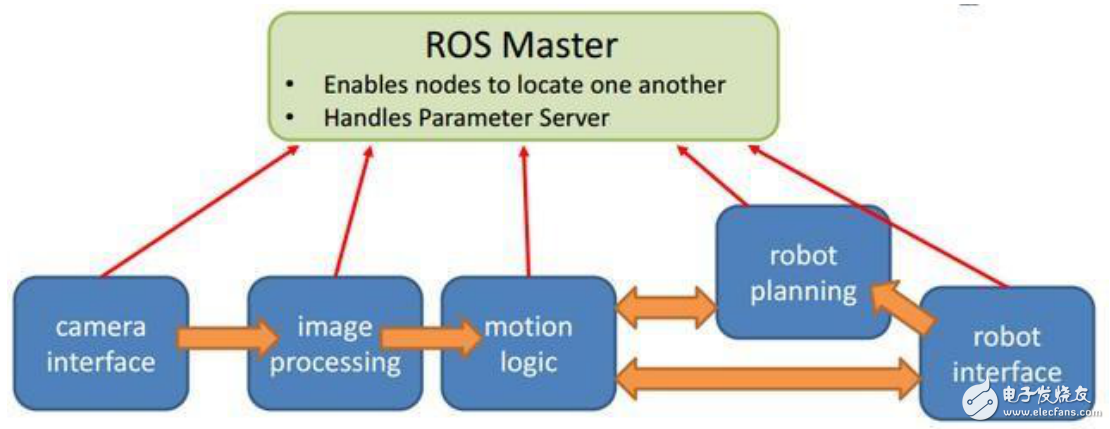
2、是一种跨平台模块化软件通讯机制
ROS 用节点(Node)的概念表示一个应用程序,不同 node 之间通过事先定义好格式
的消息(Topic),服务(Service),动作(Action)来实现连接。
△三种通讯方式的特点
三种通讯方式的优缺点可看上表,由于很多模块化编程工具都有类似功能,这里就不
具体展开了。
基于这种模块化的通讯机制,开发者可以很方便地替换、更新系统内的某些模块;也
可以用自己编写的节点替换 ROS 的个别模块,十分适合算法开发。
此外,ROS 可以跨平台,在不同计算机、不同操作系统、不用编程语言、不同机器人
上使用。
3、是一系列开源工具
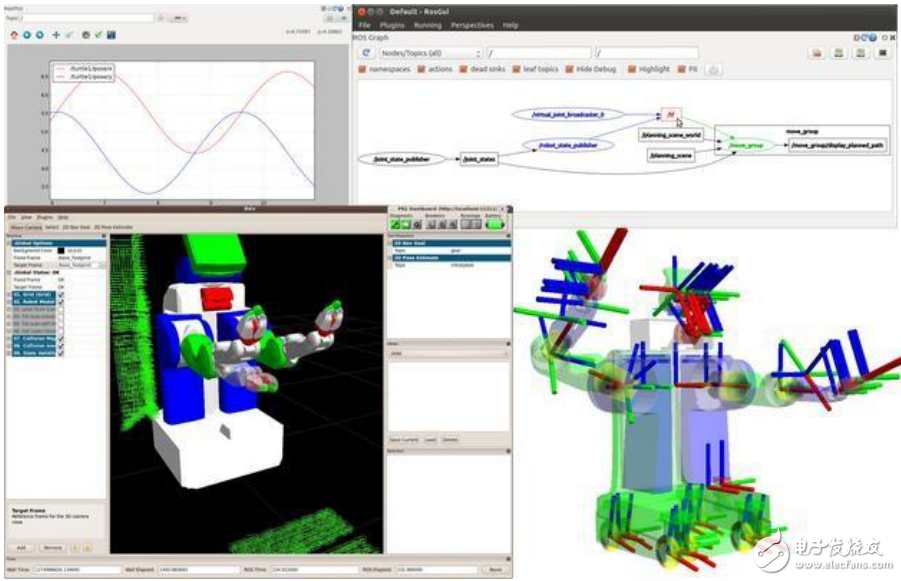
△几种 ROS 工具示意图:左上 rqt_plot,右上 rqt_graph,左下 Rviz,右下 TF
如上图所示,ROS 为开发者提供了一系列非常有用的工具,可以大大提高我们开发的
效率。
rqt_plot:可以实时绘制当前任意 Topic 的数值曲线;
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




