
资料下载


轮式移动机器人运动控制研究现状的介绍及其设计介绍
分享资料个
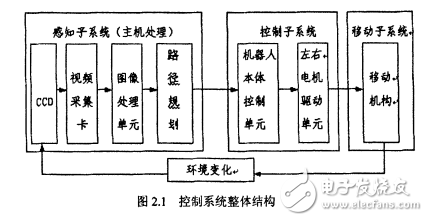
一般来说,轮式移动机器人系统主要包括小车机械结构、驱动系统、传感器信息采集系统、控制系统、移动机器人运动学模型和路径跟踪等,以下分别作些简要介绍,各部分具体将在后续章节详细介绍。 2,l移动机器人体系结构移动机器人系统要求根据视觉传感器获得的信息,控制机器人跟踪导航路径,实现机器人的自主导航的运动方式。本文设计了一套自主轮式移动机器入系统。该系统主要由三部分组成如:感知子系统,控制子系统和移动机构。移动机器人控制子系统实际上是一个闭环系统,图像传感器采集环境变化信息,通过图像采集卡将信息传递给图像处理模块,然后经路径规划模块处理后发送到运动控制子系统,最后由运动控制子系统完成任务分配,协调控制各个驱动轮的转动。从而实现对机器人的闭环控制。控制系统整体结构如图2.1所示:
2.1.1移动机器人控制系统结构移动机器人控制系统是整个机器人的核心,他决定了控制系统的性能优劣。目前,移动机器人控制系统主要有三种结构方式:集中式控制,主从式控制和分布式控制。集中式控制方式是指用一台功能比较强大的计算机实现其全部控制功能,在早期的机器人控制系统中较多地采用这种方式。随着计算机技术的飞速发展和机器人控制要求的不断提高,逐渐出现了主从式控制和分布式控制。在主从式控制结构中,有上下两级计算机,其中上位机利用它的运算能力和庞大的资源来完成复杂数据的处理,并把数据传递给下位机,下位机完成控制对象的位置控制,并把相关的数据传递给上位机。当前投入使用的移动机器人控制系统大多采用主从式控制,也采用上下二级的分布式结构,上位机负责整个系统管理以及运
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




