
资料下载


×
基于GARBF网络的机器人逆运动研究设计
消耗积分:0 |
格式:rar |
大小:0.81 MB |
2017-10-16
分享资料个
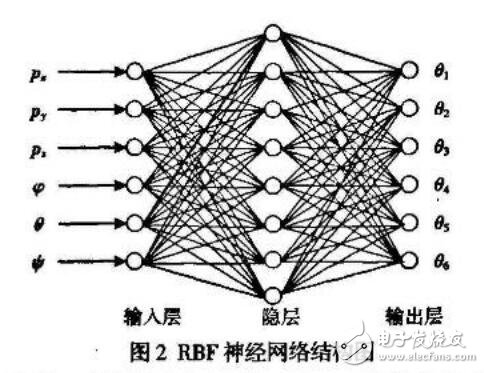
逆运动学问题是给定机器人末端操作器的位姿来计算对应的关节变量的过程。逆运动学的精确求解对机器人的控制有着非常重要的作用。相比正运动学求解,逆运动学求解要复杂得多。而且对某些结构的机器手而言,甚至不一定存在闭式逆解。神经网络具有高精度的拟合性,准确的预测性,在解决非线性映射方面的问题时有很强的逼近能力,适合逆运动学求解的要求~。结合机器人正运动学模型,采用RBF 网络直接实现ABB机器人从工作空间到关节变量的非线性映射关系,从而得到机器人位置逆解。为了获得更高的逆解精度,采用遗传算法咐RBF网络进行了优化。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




