
资料下载


×
基于指导滤波立体匹配的视觉测距系统(SAD算法)
消耗积分:0 |
格式:rar |
大小:0.83 MB |
2017-10-30
分享资料个
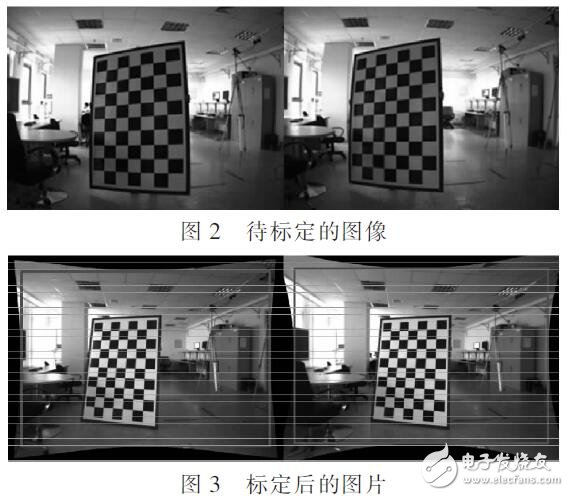
目前在机器人自主导航方面,立体视觉的应用前景广阔。,相比于造价昂贵的激光雷达,立体视觉的硬件成本仅为其五分之一左右; 而相比于超声波测距,立体视觉又有着较远的测距距离。得益于高精度的立体匹配算法和的不断提升的硬件运算速度,目前立体视觉已经能在测量精度和实时性上满足了特定场景下的需要,如在无人机障碍物躲避上已经出现较为成熟的商业化产品。虽然便于实时实现,但存在着视差图精度低,易受光线影响等缺点,导致其并不能很好的满足实际的测距需求。文中的立体匹配算法采用了最近提出的IGSMB]算法保证了最终测距的高精度和对光照的鲁棒性。双目立体视觉测距通过双目摄像机同时拍摄的左右图像对进行立体匹配,根据立体匹配得出的视差图算出目标物体的距离。立体匹配在整个测距系统中起着至关重要的作用,传统的立体匹配算法如SAD。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



