
资料下载


×
基于超声波测距的移动机器人局部导航的介绍
消耗积分:0 |
格式:rar |
大小:0.1 MB |
2017-11-15
分享资料个
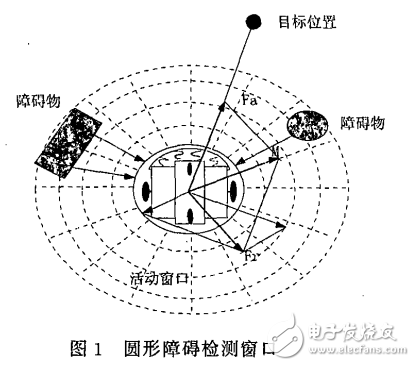
提出一种采用圆形活动窗口、考虑机器人尺寸的斥力函数和自适应目标吸引力函数、强化方向控制函数的新的改进型势能场方法,以配置超声波测距传感器的山彦移动机器人实现了回避障碍导航实验。结果表明,所提出的方法具有更强的障碍回避局部导航能力,并且算法简单。
移动机器人导航一般采用全局规划导航和局部反应式导航相结合的方法口]。人工势能场方法是广泛应用的反应式实时障碍回避局部导航算法。该算法的改进有:虚拟力场方法、向量场柱状图方法、增强型向量场柱状图方法n1、向量场柱状图与A’算法结合的VFH’方法、考虑机器人运动学约束、采用Ego-Kinematic空间的动态窗口方法‘朝、把势能场方法和进化计算机结合的最优势能场函数法‘盯、采用虚拟障碍概念防止陷入局部最小的改进势能场法们。这些改进方法或引入了环境模型和搜索算法,或采用了优化或进化算法,使改进后的方法计算量急剧增大,难以实时实现。本文提出了一种简单而有效的改进方法并以配备超声波测距传感器的移动机器人进行了实验研究。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






