
资料下载


×
自动驾驶中避障动态路径规划
消耗积分:2 |
格式:rar |
大小:0.98 MB |
2017-12-05
分享资料个
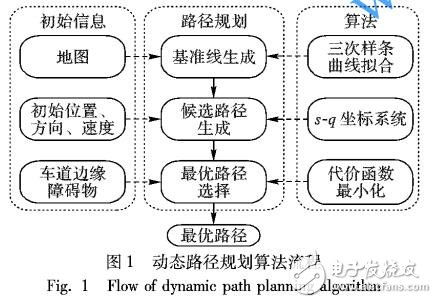
针对自动驾驶中避障的动态路径规划问题,提出一种在已知车辆的初始位置、速度、方向和障碍物位置情况下,实时避开障碍物的动态规划算法。首先,利用三次样条曲线的二阶连续性,结合已知的车道信息产生道路基准线;其次,以车辆的位置方向和道路的曲率构建s-q坐标系,并在s-q坐标系内产生从车辆当前位置到目的位置的一簇平滑曲线,作为候选路径;最后,综合考虑车辆行驶的安全性、平滑性和连贯性准则,设计一种新的代价函数,并且通过使代价函数最小化的方法从候选路径中选择最佳路径。在实验过程中,通过设计多种不同的模拟道路来检验算法的性能。实验结果表明,该方法在多种地形的单车道和多车道道路上都能够规划出安全、平滑的路径,有效避开障碍物,并且具有较好的实时性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






