
资料下载


×
利用并查集的多视匹配点提取算法
消耗积分:3 |
格式:rar |
大小:0.87 MB |
2017-12-18
分享资料个
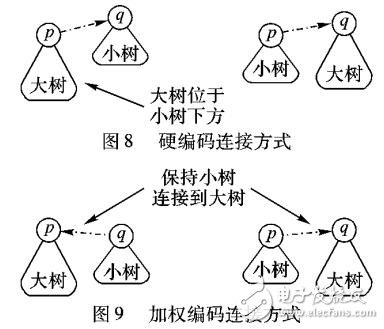
场景的成像过程是从三维空间到二维平面的一个投影变换过程,场景中的同一个空间点会在不同的影像上成像,这些相关联的二维像点称为多视影像的同名像点或多视匹配点,建立多视影像中同名像点的对应关系是三维重建的核心问题之一。对于多视影像集,由于缺少影像间空间关系的先验信息,现有的三维重建算法通常首先对所有可能的像对进行匹配,然后从所有两视影像的匹配结果中提取多视匹配点。目前比较具有代表性的多视匹配点提取算法包括基于图论的算法和Bundler算法。基于图论的算法将多视匹配点提取的可靠性定义为其在图中的最弱联结,通过最大化这个可靠性函数来提取多视匹配点,但计算过程中包含大量的图形分类算法,需要消耗过多的计算资源,这导致基于图论的算法适用性不强。Bundler检测每一张影像的每一个特征点,通过广度优先搜索( Breadth-First-Search,BFS)算法寻找所有其他影像上与该特征点匹配的特征点集,但Bundler中多视匹配点提取算法的结果依赖于所选初始影像的序号以及像对增加的顺序,并且计算消耗大哺]。本文利用并查集( Union Find,UF)算法来提取多视匹配点,并设计丁加权编码的优化策略。实验结果表明,本文算法比Bundler算法更加可靠,且提取效率更高。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章


下载排行榜
- 暂无相关数据

