
资料下载


如何使用动态曲线进行车道检测算法的资料概述.
分享资料个
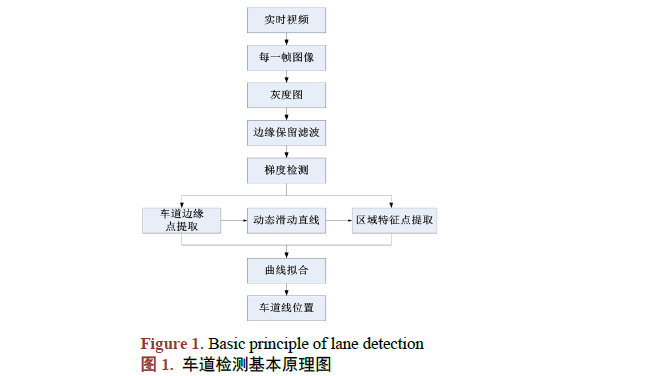
针对无人驾驶技术中关于复杂车道线的检测问题,本文提出了一种基于车道线的颜色梯度变化和视频每帧图像的关联性的复杂车道线检测算法。该算法通过梯度检测的方法对原图像进行边缘像素提取,通过动态曲线的限制对所得的边缘像素进行特征点提取,筛选出目标边缘像素,去除非目标边缘像素。最后通过曲线拟合检测出车道线位置。通过现场实测表明,此算法最终能够通过曲线拟合得到较为准确的复杂车道线的位置信息。同时,实测结果也说明了此算法相比于其他算法而言具有更好的是实时性和鲁棒性。
随着国内交通领域和经济的飞速发展,汽车在人们生活中得到了广泛的普及,随之而来的却是交通事故发生率不断攀升,每年都有许多人由于驾驶中的疏忽大意丧生于交通事故中或给他人造成伤害。汽车给人们带来便利的同时,也给人们的生命和财产带来了巨大损失。经汽车安全专家指出:约有50%的汽车交通事故是因为汽车偏离正常的行驶车道引起的,并且多发于复杂车道,例如弯道行驶。究其原因主要是驾驶员心神烦乱、注意力不集中或驾驶疲劳。由此,无人驾驶技术和智能驾驶辅助系统得到了飞速发展,大大降低了由于司机疲劳驾驶引起的交通事故率。本文研究的重点是复杂车道检测算法,该算法在无人驾驶中应用广泛,是其必不可少的一部分,广泛应用于自动泊车、路径规划、自动避障等多个无人驾驶领域。
当前基于无人驾驶有关直道的车道线检测技术日趋成熟,人们用不同的方法在直线检测上取得了较好的成果。提出基于Snake 的车道线检测方法,通过利用车道线消失点的结构特征进行车道线检测,并用Snake 方法对车道线进行迭代拟合;提出基于随机抽样一致性的车道线检测方法,此方法利用车道线平行的结构特征进行车道线检测;中提出利用形态学图像处理技术,基于形态学变换的道路检测方法,能够应用形态学变换、Canny 边缘检测与Hough 变换检测出直线道路车行道的边缘线。
然而,现有的技术仍然无法准确的检测复杂车道线以及非标准车道线,对复杂车道线及非标准车道线的检测方法研究是无人驾驶中的一个难局。提出一种基于机器视觉的车道检测与重建方法。采用链码算法检测分道线,用链码来记录车道线轮廓信息,再基于曲率模型的卡尔曼递推估计方法来估计当前的车道线位置,同时用来预测和检测下一时刻的车道线位置,并建立了车道数学模型。文献[5]提出一种基于多特征信息融合优化的鲁棒性车道线检测算法。首先构建了基于二次曲线空间道路模型图像中左右车道线数学模型;然后融合像素梯度值、梯度方向、像素灰度以及车道线结构等多特征信息,构造后验概率函数;最后采用基于免疫克隆策略的改进粒子群优化算法优化车道线模型参数,实现车道线提取。提出利用Hough 变换来实现对车道检测的直道检测。而对于弯道部分的检测,通过统计较小区域的目标像素数目,设置感兴趣区域(ROI)来判断车道的弯曲方向,并在该方向上进行弯道像素的搜索,采用多段折线的方法对弯道部分进行重建。
实际道路状况复杂多变,各种干扰因素加大了车道检测的难度。国内外学者对于不同的干扰因素已提出了诸多算法,例如针对交通场景中运动车辆的车道检测方法、基于车载单色摄像机提供的图像检测和跟踪车道的鲁棒方法、基于可控滤波器进行车道检测的方法、针对夜间的车道检测算法。
当今现有的车道检测算法实用性和鲁棒性低,检测复杂车道线及非标准车道线的准确度及鲁棒性低,为了更好地解决这一问题,突破车道检测的困局,本文基于视觉处理将多种算法进行融合,构建了一个相对完善的视觉处理系统,能够有效地适用各种不同的行车环境,降低天气、光照等因素对车道检测的影响,通过实测与比较发现该方法提高了车道检测的准确性、实用性和鲁棒性。无人驾驶的技术难局在于感知周围环境,车道检测算法的进步对无人驾驶的发展起着不可忽视的推动作用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



