
资料下载


如何使用小型Zynq SoC硬件加速改进实时车辆检测算法的实现
分享资料个
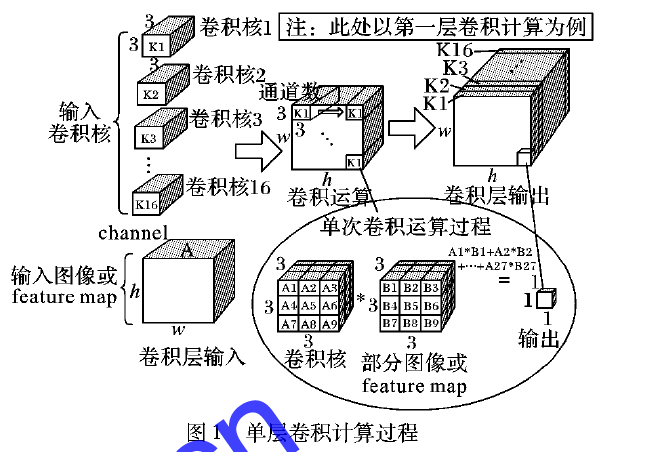
针对 TINY YOLO车辆检测算法计算量过大,且在小型嵌入式系统中难以达到实时检测要求的问题。利用小型Zynq SoC系统的架构优势以及TINY Y0LO的网络权值中存在大量接近零的权值参数这一特点,提出硬件并行加速的改进算法,称为浓缩小型深度网络( Xerantic-TINY YOLO, X-TINY YOLO)车辆检测算法。首先对TINYY0LO中网络结构进行压缩;其次采用高效多级流水线、流水线内全并行的方式对卷积计算部分进行算法加速;最后提出与网络结构相配合的数据切割和传输方案。实验结果表明,X-TINYYOLO仅消耗50%的片内硬件资源,可在相。对于GPU和CPU性价比更高更适合嵌入式场景的Zynq SoC系统上实现,且其检测速度达到24帧/s,满足车辆检测的实时性要求。
实时车辆检测算法主要分为三类:基于先验知识的车辆检测算法、基于浅层机器的学习车辆检测算法以及基于深度学习的车辆检测算法o
基于先验知识的检测算法是根据车身所带有的线条、阴影或边缘特征对前方车辆进行识别。通过对车辆尾部特定水平直线(如保险杠后车窗下边沿等)的检测达到车辆检测目的。该算法易将车身周边环境中存在的类似直线误判为车辆,且对处于转弯状态的车辆会出现检测丢失现象。中提出对刹车灯进行检测的方法实现车辆夜间检测,效果较好但无法应用于外部光强较好的白天或地下停车场等环境。行驶中车辆周边环境的多样性常常会以噪声形式干扰此类检测方法准确率,故此类方法难以在环境变化剧烈的使用场景中适用。
基于浅层机器学习的车辆检测算法以先验知识类算法中提取的车辆特征为基础,结合机器学习算法实现车辆的检测。中提出Haar-like与Online Boosting 相结合的方式,使用大量特征集对网络进行训练使其能检测车辆,与单纯的先验知识检测相比该算法在各种环境中的鲁棒性有了显著提高。对Har-like特征进行了优化,提升了该特征对环境中光强变化的适应性。该类算法特点是检测效率高、复杂度低,但依然严重依赖特征选取,使得其在复杂且变化的路况场景下重建模工程量大。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



