
资料下载


×
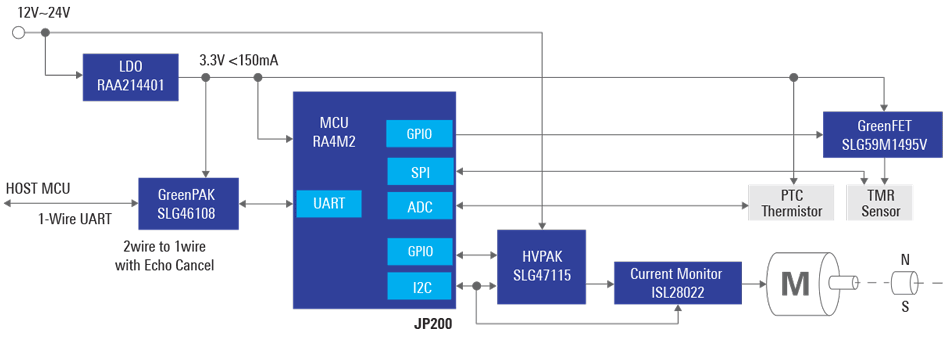
适用于机器人四肢的伺服电机控制
消耗积分:0 |
格式:zip |
大小:7.17 MB |
2022-12-30
香香技术员
分享资料个
方案介绍
该系统能够控制电机的运动角度,实现足够的扭矩和速度。 它还通过连接到主机 MCU 的单线式 UART 监控多个电机的状态,让用户可以减少系统中的线束,并控制机器人的四肢,比如服务型机器人、操纵器和自动引导车 (AGV)。 SLG47115 HVPAK™ 可编程混合信号矩阵采用微型 2mm x 3mm QFN 封装,具有高压半桥驱动能力,能够最大限度地缩小伺服电机的尺寸。
系统优势:
- 通过命令控制电机的运动角度,实现足够的扭矩和速度
- 通过带回声消除功能的单线式 UART 读取电机状态
- 级联多个伺服系统,可减少系统中的线束
- 体积小巧,可嵌入机器人中
目标应用:
- 服务机器人
- 自动引导车
- 操纵器
- 人形机器人
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






