
资料下载


×
如何让Arduino使用雷达避开障碍物
消耗积分:2 |
格式:zip |
大小:0.00 MB |
2023-06-26
分享资料个
描述
在本教程中,我们将使用连接到伺服电机的 HC-SR04 超声波传感器制作带有雷达的 Arduino 避障机器人汽车。
为什么这个项目比其他所有“避障车”项目都好,因为那里的大多数项目只检测前面的障碍物,然后伺服检查左侧或右侧并决定机器人应该去哪里,所以没有对所有角度的实时检测。
在这辆机器人车上,伺服器一直将超声波从左侧旋转到右侧,就像雷达一样,一旦在任何一点上检测到障碍物,就会触发反向,并且行进方向是变了。
“雷达”探测的角度可以调整,探测的距离也可以调整。
第 1 步:您需要什么

1 / 6
- Arduino UNO(或任何其他板)
- 智能车底盘四驱
- L298N 直流电机控制器
- 超声波传感器(HC-SR04)
- 伺服电机
- 超声波传感器 (HC- SR04) 支架伺服安装 - 3D 打印部件在这里下载如果您没有支架,您可以找到其他方法将传感器连接到伺服电机,也许是一些胶水等
- 跳线
- Visuino 程序:下载 Visuino
第 2 步:电路
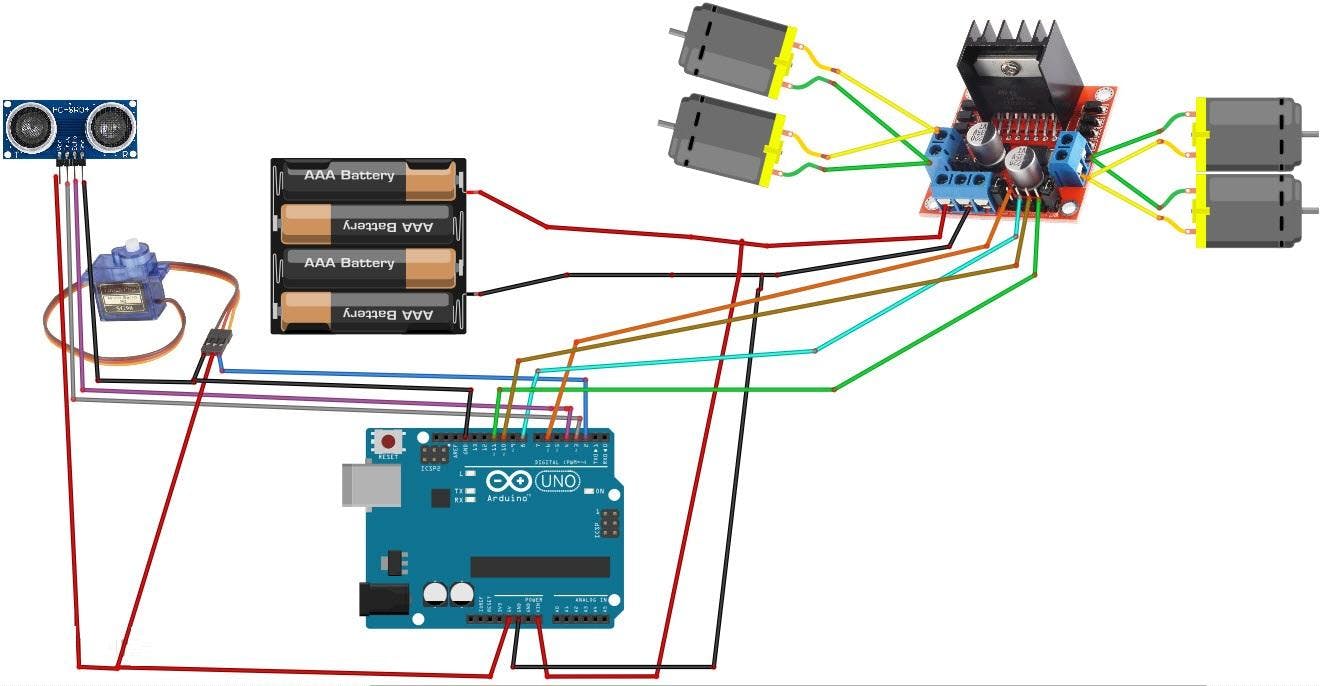
- 将电源(电池)引脚(gnd)连接到电机驱动器控制器引脚(gnd)
- 将电源(电池)引脚 (+) 连接到电机驱动器控制器引脚 (+)
- 将电源(电池)引脚 (+) 连接到 Arduino 引脚 (VIN)
- 将 Arduino 的 GND 连接到电机驱动器控制器引脚 (gnd)
- 将 Arduino 的数字引脚 (6) 连接到电机驱动器引脚 (IN1)
- 将 Arduino 的数字引脚 (8) 连接到电机驱动器引脚 (IN2)
- 将 Arduino 的数字引脚 (10) 连接到电机驱动器引脚 (IN3)
- 将 Arduino 的数字引脚 (11) 连接到电机驱动器引脚 (IN4)
- 将直流电机(在机器人的右侧)连接到电机驱动器的一侧
- 将直流电机(在机器人的左侧)连接到电机驱动器的另一侧
- 将超声波模块引脚 (VCC) 连接到 Arduino 引脚 [+5V]
- 将超声波模块引脚 (GND) 连接到 Arduino 引脚 [GND]
- 将超声波模块引脚 (ECHO) 连接到 Arduino 数字引脚 (4)
- 将超声波模块引脚 (TRIG) 连接到 Arduino 数字引脚 (3)
- 将伺服电机“橙色”(信号)引脚连接到 Arduino 数字引脚 [2]
- 将伺服电机“红色”引脚连接到 Arduino 正引脚 [5V]
- 将伺服电机“棕色”引脚连接到 Arduino 负极引脚 [GND]
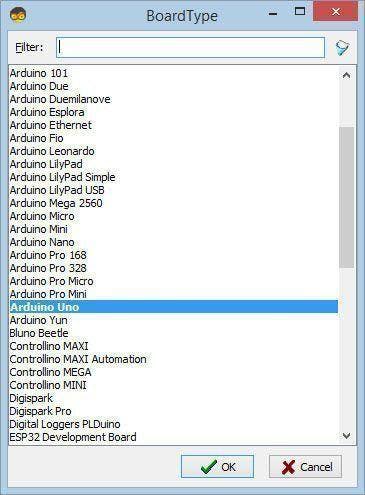
第 3 步:启动 Visuino,并选择 Arduino UNO 板类型
1 / 2
需要安装Visuino:https ://www.visuino.eu。如图1所示启动Visuino 单击Visuino中Arduino组件(图1)上的“工具”按钮 出现对话框时,选择“Arduino UNO”,如图2所示
第 4 步:在 Visuino 添加组件
1 / 10
- 添加“时钟发生器”组件
- 添加“正弦模拟发生器”组件
- 添加“超声波游侠”组件
- 添加“伺服”组件
- 添加“比较模拟值”组件
- 添加“模拟值”组件
- 添加“定时器”组件
- 添加“逆变器”组件
- 添加 2X“ Speed and Direction To Speed ”组件
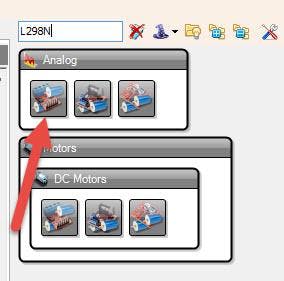
- 添加“ L298N ”组件
第 5 步:在 Visuino 中设置组件
1 / 6
- 选择“ ClockGenerator1 ”并在“属性”窗口中将“频率”设置为 70
这意味着伺服电机移动多快(您可以调整数字)
- 选择“ SineAnalogGenerator1 ”并在属性窗口中将“ Amplitude ”设置为 0.3
这意味着伺服将向左或向右旋转多远。(您可以调整数字)
- 选择“ CompareValue1 ”并在“属性”窗口中选择“比较类型” ctSmallerOrEqual并将“值”设置为 30(您可以调整数字)
这意味着在 30 厘米或更短的距离处,机器人小车将倒车(您可以调整数字)
- 选择“ AnalogValue1 ”并在“属性”窗口中将“值”设置为 0.9
这将是机器人汽车的默认速度您可以将其设置为更小或设置为 1 以获得全速
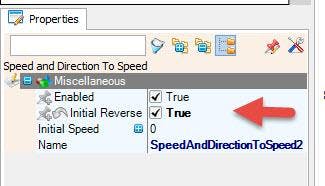
- 选择“ SpeedAndDirectionToSpeed1 ”并在属性窗口中将“ Initial Reverse ”设置为 True
这将反转启动方向,根据您的电机接线,您可以将其保留为 False
- 选择“ SpeedAndDirectionToSpeed2 ”并在属性窗口中将“ Initial Reverse ”设置为 True“这将反转启动方向,根据您的电机接线,您可以将其保留为 False
第 6 步:在 Visuino Connect 组件中
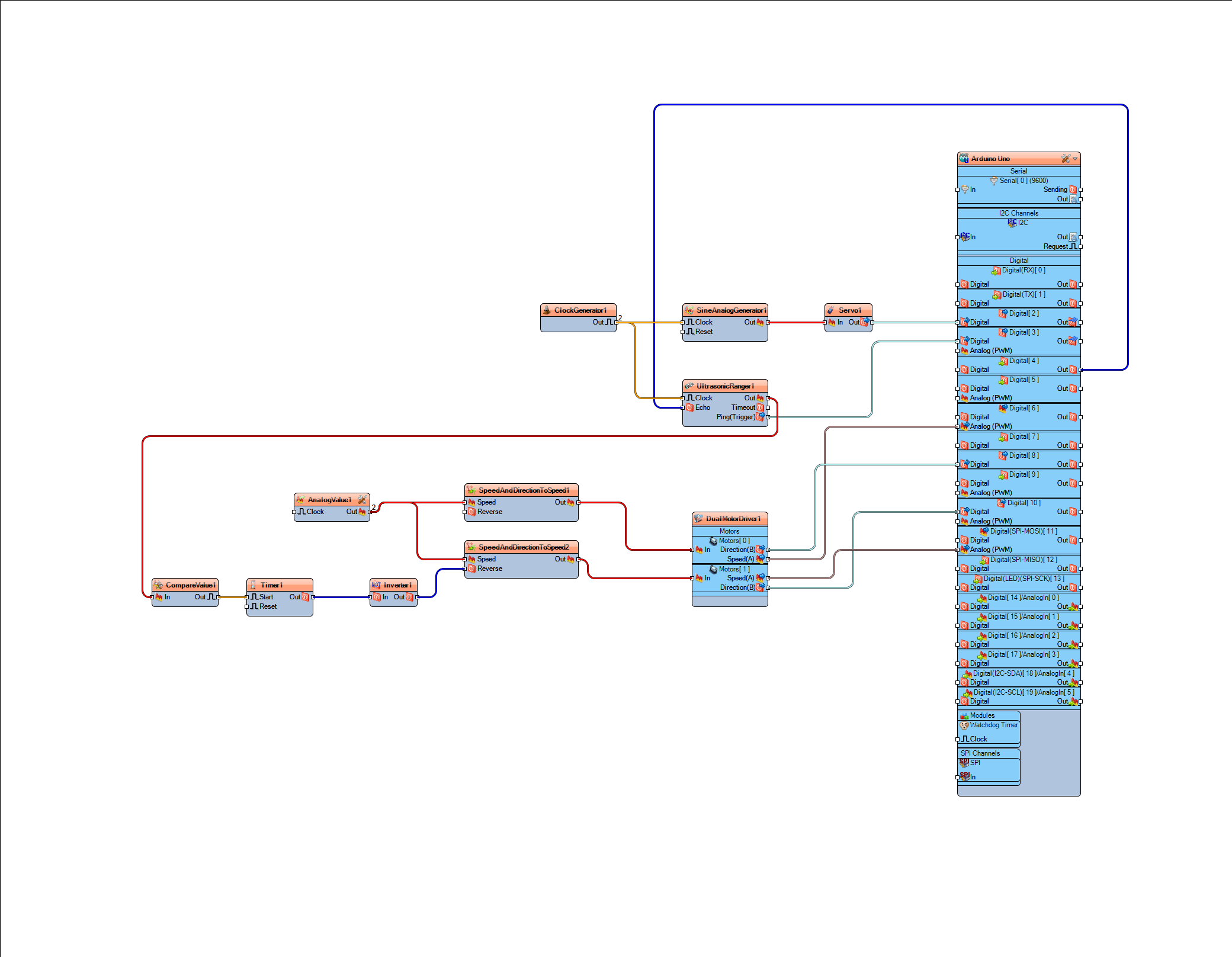
1 / 3
- 将“ ClockGenerator1 ”引脚 [Out] 连接到“ ClockGenerator1 ”引脚 [Clock]
- 将“ ClockGenerator1 ”引脚 [Out] 连接到“ SineAnalogGenerator1 ”引脚 [Clock]
- 将“ SineAnalogGenerator1 ”引脚 [Out] 连接到“ Servo1 ”引脚 [In]
- 将“ Servo1 ”引脚[Out]连接到Arduino板数字引脚[2]
- 将Arduino 板数字输出引脚 [4] 连接到“ UltrasonicRanger1 ”引脚 [Echo]
- 将“ UltrasonicRanger1 ”引脚 [Trigger] 连接到 Arduino 板数字引脚 [3]
- 将“ UltrasonicRanger1 ”引脚 [Out] 连接到“CompareValue1”引脚 [In]
- 将“ CompareValue1 ”引脚 [Out] 连接到“Timer1”引脚 [Start]
- 将“ Timer1 ”引脚 [Out] 连接到“ Inverter1 ”引脚 [In]
- 将“ Inverter1 ”引脚 [Out] 连接到“ SpeedAndDirectionToSpeed2 ”引脚 [Reverse]
- 将“ IAnalogValue1 ”引脚 [Out] 连接到“ SpeedAndDirectionToSpeed1 ”引脚 [Speed]
- 将“ IAnalogValue1 ”引脚 [Out] 连接到“ SpeedAndDirectionToSpeed2 ”引脚 [Speed]
- 将“ SpeedAndDirectionToSpeed1 ”引脚 [Out] 连接到“ DualMotorDriver1 ”“Motor0”引脚 [In]
- 将“ SpeedAndDirectionToSpeed2 ”引脚 [Out] 连接到“ DualMotorDriver1 ”“Motor1”引脚 [In]
- 将“ DualMotorDriver1 ”“Motor0”引脚 [方向 B] 连接到Arduino 板数字引脚 [6]
- 将“ DualMotorDriver1 ”“Motor0”引脚 [Speed A] 连接到Arduino 板模拟 (PWM) 引脚 [8]
- 将“ DualMotorDriver1 ”“Motor1”引脚 [Speed A] 连接到Arduino 板模拟 (PWM) 引脚 [11]
- 将“ DualMotorDriver1 ”“Motor1”引脚 [方向 B] 连接到Arduino 板数字引脚 [10]
第 7 步:生成、编译和上传 Arduino 代码
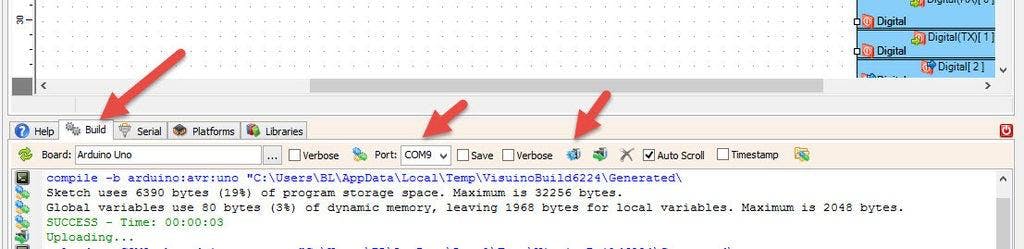
。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




