
资料下载


基于嵌入式移动机器人控制系统的工作过程及其设计与实现
分享资料个
随着科学技术的发展和社会的需要,移动机器人技术得到了迅速发展,正在渗透到各行各业中,使人们的生活更加便利。现今以单片机为核心的移动机器人存在处理数据量有限、控制系统速度低、人机交互机制单一等缺点,不能满足机器人多任务的要求。系统中增加协处理器的系统结构也得到了广泛应用,虽然可以管理多种传感器,但这种结构却增加了硬件的冗余度和复杂度,见参考文献。为此,提出了以嵌入式处理器S3C2440 为核心的多任务机器人控制系统。
1控制系统硬件设计
控制系统选用两轮独立驱动小车为移动式机器人平台,后轮为一个尼龙万向轮。处理器为三星公司的S3C2440,系统主频最高可达533MHz,外接512MB 的NANDFlash 和64MB支持SPI、I2C、UART 等接,满足移动机器人控制系统的需求,如图1所示。
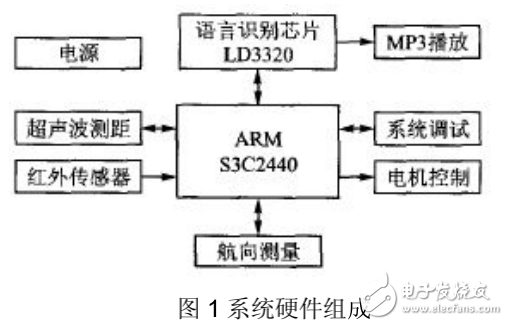
整个控制系统工作过程如下: 语音识别芯片LD3320 通过SPI总线接[ ]接人ARM 处理器,处理器可以对识别的结果进行分析和汇总,并通过查表提取出操作人员的命令码; 同时,处理器通过串口读取机器人当前的航向信息; 超声波测距和红外线地面检测模块由处理器的GPIO引脚控制; 通过控制两自由度的云台,可以进行多方位的超声波障碍物检测,利用LD3320 模块的MP3 播放功能播放所检测到的障碍物距离和路况信息。控制系统根据传感器的数据和所识别的操作人员的命令码,利用信息融合技术提取环境特征,通过路径规划技术作出决策,控制电机状态,最终控制机器人的姿态。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





