
资料下载


×
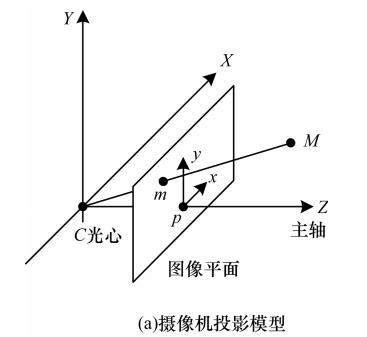
基于单线激光雷达和单目视觉的负障碍检测算法
消耗积分:1 |
格式:rar |
大小:3.71 MB |
2018-02-01
分享资料个
近年来,无人车成为热门研究方向。障碍物检测是无人车研究中的一个重要组成部分,无人车行驶的环境主要包括结构化道路(城市街道、高等级公路)和非结构化道路(越野道路)。障碍物主要分为正障碍和负障碍,正障碍指凸起于地面的物体,而负障碍一般指像坑、沟渠、陡峭的下坡这样的场景。由于负障碍位于车载传感器难以测量的地面下方,因此一定距离上的负障碍检测仍具有很大挑战。
近年来,无人车成为热门研究方向,而负障碍物检测是地面无人车环境感知与理解的任务之一。为此,提出一种基于单线激光雷达和单目视觉的负障碍检测算法。为弥补单线激光雷达在覆盖能力方面的不足,对检测到的负障碍区域在摄像机画面中进行跟踪,结合跟踪结果对负障碍区域做进一步判别。实验结果表明,该算法在多种实验场景下拥有96%以上的负障碍检测准确率,可有效应用于微小型地面无人车辆。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章


下载排行榜
- 暂无相关数据

